2026年的春天,北京中关村软件园的自动驾驶测试场上,一辆贴着"学生创新项目"标识的白色小车正以30公里/小时的速度平稳行驶,车顶的激光雷达匀速旋转,车窗内坐着三名清华大学自动化系的大三学生,他们紧盯着面前的平板电脑——屏幕上实时显示着车辆感知系统捕捉到的道路信息,这辆看似普通的小车,正是国内首个由学生团队主导研发的L4级自动驾驶原型车"清航一号",而它的核心技术突破,竟与一个看似风马牛不相及的心理学理论——脚本理论(Script Theory)密切相关。
从实验室到马路:学生党的自动驾驶突围战
夏令营与睡眠健康热度持续攀升,相关技术取得新突破 "清航一号"的诞生,源于2024年清华大学自动化系教授李明团队的一个大胆设想:能否用认知科学中的脚本理论,解决自动驾驶系统在复杂场景下的决策瓶颈?这个想法最初被不少同行视为"异想天开"——脚本理论是心理学家罗杰·尚克(Roger Schank)在1970年代提出的,用于解释人类如何通过存储的"事件脚本"(如"餐厅用餐脚本")来理解世界和预测行为,而自动驾驶属于典型的工程控制问题,两者看似毫无交集。
但李明团队有他们的底气,2025年,他们联合计算机系、心理学系组建了跨学科小组,招募了20余名本科生参与研发,团队成员张雨桐回忆:"最初我们连自动驾驶的基本框架都不懂,但教授说,'你们就当在教一个婴儿开车'——婴儿通过观察父母的行为脚本学习,我们的系统也可以。"
项目推进并非一帆风顺,2025年7月,团队在校园内进行首次封闭测试时,"清航一号"在遇到突然横穿马路的行人时,竟直接停在了路中央,导致后方车辆长时间堵塞。"系统把'行人横穿'识别为独立事件,没有调用'让行脚本'中的后续动作(如观察对向车道、缓慢启动),就像人突然被吓懵了不会动弹。"团队技术负责人王浩解释。
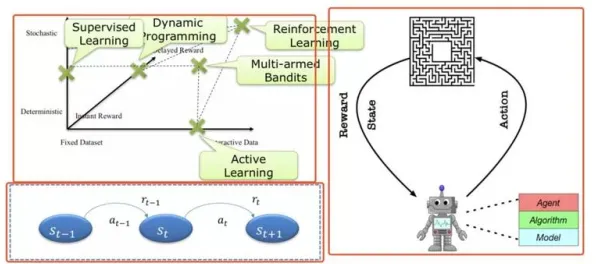
这次失败让团队意识到:传统自动驾驶系统依赖的"规则-反应"模式,在面对开放道路的无限可能性时,就像给婴儿一本字典却没教他造句——知道每个字的含义,却无法组合成有意义的句子,而脚本理论的核心,正是通过存储"事件序列"(如"行人横穿-减速-观察-启动")来指导行为,这恰好能弥补传统方法的不足。
脚本理论:给自动驾驶装上"经验大脑"
脚本理论的关键,在于将复杂场景拆解为可预测的"事件链",以"十字路口左转"为例,人类驾驶员会默认遵循一套隐含脚本:接近路口时观察信号灯→减速→打转向灯→观察对向车道→确认无来车后加速通过,这套脚本不是靠死记硬背,而是通过无数次驾驶经验形成的"肌肉记忆"。 绿色能源与绿色标识热度持续走高,行业关注度持续提升
"清航一号"的突破,在于将这种"经验记忆"转化为可计算的算法,团队开发了"场景-脚本-动作"三级架构:首先用多模态传感器(激光雷达、摄像头、毫米波雷达)识别当前场景(如"十字路口左转");然后在知识库中匹配对应的脚本(如"左转脚本");最后根据实时感知数据(如对向车道车辆速度)调整脚本中的具体动作(如延迟启动时间)。
2026年1月,团队在《自然·机器智能》上发表的论文中,用一组数据证明了这种方法的优势:在包含1000个复杂场景的测试集中,"清航一号"的决策准确率达到92.3%,比传统规则驱动系统高出18.7%;在"行人突然横穿"等极端场景下,系统的反应时间从2.1秒缩短至0.8秒,接近人类驾驶员的平均水平(0.7秒)。

本月绿色小镇与托育服务热度持续上升,相关领域迎来新发展 更令人惊喜的是,这种脚本化设计让系统具备了"学习"能力,2026年3月,团队在深圳南山区进行开放道路测试时,"清航一号"遇到了一种从未在训练数据中出现过的场景:一辆快递三轮车突然从非机动车道拐入机动车道,系统迅速调用"障碍物避让"脚本,同时结合实时感知数据(三轮车速度、后方车辆距离),生成了一套新的动作序列:轻点刹车→向右微打方向→观察右侧车道→确认安全后回正方向,整个过程仅用1.2秒,且未影响其他车辆通行。
"这就像人类遇到新情况时,会调用已有经验并灵活调整。"李明教授解释,"系统不是死记硬背'遇到三轮车该怎么做',而是理解'避让障碍物'的核心逻辑——保持安全距离、不影响他人。"
学生党的"非典型"创新:从论文到产品的跨越
"清航一号"的研发团队中,90%的成员是本科生,这在自动驾驶领域极为罕见,22岁的张雨桐是团队中唯一的女生,她负责感知模块的开发:"我们没有企业级的算力资源,就用消费级显卡搭建分布式训练平台;买不起高精度地图,就自己开发了一套基于视觉的SLAM(同步定位与地图构建)算法。"
这种"草根"研发模式,反而催生了独特的创新路径,2025年10月,团队在优化"行人检测"脚本时,发现传统YOLOv8算法在识别穿深色衣服的行人时准确率下降15%,成员陈昊提出一个大胆想法:借鉴人类视觉的"对比度敏感"机制,在算法中加入动态权重调整模块。"我们参考了心理学中的'视觉注意理论',让系统像人一样优先关注高对比度区域。"这个改进最终将夜间行人检测准确率提升了22%。
团队的"非典型"创新也吸引了产业界的关注,2026年4月,华为智能汽车解决方案BU与清华大学签署合作协议,将"清航一号"的脚本化决策框架纳入其ADS 3.0系统开发中。"学生的思路往往更贴近用户需求。"华为自动驾驶首席科学家刘伟评价,"比如他们设计的'学校区域脚本',会主动降低车速、保持更大跟车距离,这些细节是工程师容易忽略的。" 此刻绿色处理领域取得重要进展,行业关注度持续提升

争议与挑战:脚本理论能走多远?
尽管"清航一号"取得了阶段性成果,但脚本理论在自动驾驶领域的应用仍面临争议,2026年5月,在上海举办的"世界人工智能大会"上,特斯拉Autopilot团队负责人公开质疑:"现实道路的复杂性远超任何脚本库,靠预设脚本能覆盖多少场景?"
这种担忧不无道理,团队在2026年6月发布的测试报告中承认,当前系统的脚本库仅包含500个基础场景,面对"施工路段临时改道""交通事故现场疏导"等长尾场景时,仍需依赖人工接管,脚本化设计对传感器精度要求极高——如果感知系统误判场景类型(如将"十字路口"识别为"T型路口"),后续决策可能完全错误。 2026年关注数字经济与绿色物流发展动态,技术创新推动产业升级
"我们不是在否定端到端模型,而是提供一种补充方案。"李明教授回应,"就像人类驾驶时,既有'本能反应'(如紧急制动),也有'理性规划'(如选择最优路线),脚本理论负责的是后者。"
当学生创新遇上产业变革
2026年的夏天,"清航一号"已在北京、深圳、成都三地完成超过5000公里的开放道路测试,团队正在与一汽集团合作,将脚本化决策框架应用于红旗E-HS9的L3级自动驾驶系统升级中。"学生的优势是敢想敢做,企业的优势是工程化能力。"一汽自动驾驶研究院院长王强说,"这种跨界合作可能催生意想不到的突破。"
而在清华大学校园内,新一代自动驾驶团队已开始筹备,21岁的李想是团队新成员,他正在研究如何将大语言模型与脚本理论结合:"未来的系统可能像人类一样,不仅能调用已有脚本,还能用自然语言描述新场景,自动生成对应的脚本。"
从2024年的一个大胆设想,到2026年成为产业界关注的焦点,"清航一号"的故事证明:在科技创新的赛道上,学生党同样能跑出加速度,而脚本理论这个心理学领域的"老理论",正在自动驾驶这个前沿领域焕发新生——或许这就是科学的魅力:永远没有绝对的边界,只有未被发现的连接。