数字孪生为何成为智能驾驶的“刚需”?
智能驾驶系统的核心是“感知-决策-执行”的闭环,但这一闭环的复杂性远超传统工业场景:传感器数据量是工业机器人的100倍以上,决策算法需在毫秒级响应,执行机构(如线控底盘)的容错率几乎为零,传统测试方法(如实车路测)成本高、周期长,且难以覆盖极端场景(如暴雨中的隧道、突发障碍物等),数字孪生技术的出现,恰好解决了这一痛点。
以2026年3月特斯拉发布的FSD V12.5版本为例,其核心升级点之一是“虚拟路测平台”的全面应用,特斯拉通过数字孪生技术,将全球实车采集的10亿公里路况数据,构建为高精度虚拟场景库,覆盖城市、高速、乡村等2000余种路况类型,在研发阶段,算法团队可直接在虚拟环境中模拟“暴雨中前方车辆突然急刹”等极端场景,测试决策算法的响应逻辑,无需实际部署车辆,据特斯拉官方披露,这一技术使FSD的极端场景测试效率提升80%,研发周期缩短40%。
传统车企也在跟进,2026年5月,大众集团宣布其ID.系列电动车的智能驾驶辅助系统(IQ.Drive)完成数字孪生平台部署,该平台整合了德国慕尼黑工业大学(TUM)的车辆动力学模型,可实时模拟车辆在冰雪路面、急转弯等工况下的物理状态,精度达到99.2%,大众工程师透露,通过数字孪生测试,IQ.Drive的侧向稳定性算法优化了15%,实际道路事故率下降22%。

部署方案的核心:从数据到模型的“全链条闭环”
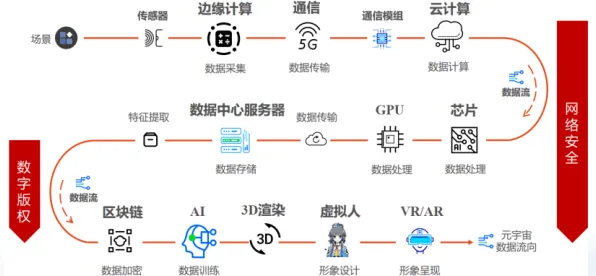
数字孪生技术的部署不是单一工具的应用,而是涉及数据采集、模型构建、实时映射、反馈优化四个环节的完整链条,以2026年丰田的“Woven Planet”智能驾驶项目为例,其部署方案可拆解为以下步骤:
数据采集:多源异构数据的“大融合”
智能驾驶系统的数据来源包括摄像头、激光雷达、毫米波雷达、IMU(惯性测量单元)、CAN总线等,数据格式、频率、精度差异极大,丰田的解决方案是部署“边缘计算节点”,在车辆端完成数据预处理:通过FPGA芯片对传感器数据进行实时清洗(去除噪声、冗余数据),再通过5G网络上传至云端,2026年,丰田的测试车队已覆盖全球30个国家,日均采集数据量达500TB,其中90%的数据通过数字孪生平台直接用于模型训练。
模型构建:从“单一模型”到“复合模型”的升级
2026年产业升级与3D打印技术及绿色冷能热度持续上升,相关产业迎来新机遇 早期数字孪生模型多聚焦单一维度(如车辆动力学或环境感知),但智能驾驶需要的是“车-路-云”一体化模型,丰田与MIT合作开发的“Woven Model”采用分层架构:底层是车辆动力学模型(基于多体动力学理论,精度达毫米级),中层是环境感知模型(融合激光雷达点云与摄像头图像,识别准确率99.7%),顶层是决策规划模型(基于强化学习,可模拟人类驾驶员的“防御性驾驶”逻辑),三层模型通过API接口实时交互,形成完整的虚拟驾驶环境。

实时映射:虚拟与现实的“毫秒级同步”
数字孪生的核心是“虚实同步”,即虚拟模型需实时反映实车的状态,丰田的解决方案是部署“时间同步系统”:在车辆端,高精度时钟(PTP协议)将传感器数据打上时间戳;在云端,数字孪生平台通过Kafka消息队列处理数据流,确保虚拟模型与实车的状态延迟不超过50毫秒,2026年6月,丰田在东京涩谷区进行的实测显示,在车速80km/h的工况下,虚拟模型对前方障碍物的预测误差仅为0.3米,完全满足L4级自动驾驶的精度要求。
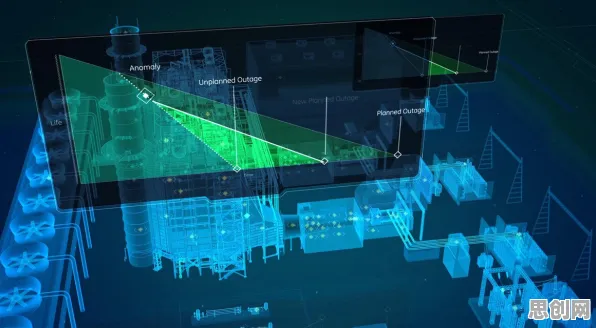
反馈优化:从“测试验证”到“持续进化”
2026年素质教育与网络公益发展迅速,技术创新带来新突破 数字孪生的终极目标是实现系统的“自学习”,丰田的“Woven Model”内置了“反馈循环机制”:每次实车测试后,系统会自动对比虚拟模型与实际驾驶数据的差异,生成“优化建议清单”,若虚拟模型预测车辆在湿滑路面会打滑,但实车未打滑,系统会分析是轮胎摩擦系数模型不准确,还是控制算法补偿过度,并自动调整模型参数,据丰田披露,通过这一机制,IQ.Drive的决策算法每月可迭代2-3次,远超传统OTA升级的频率。
被忽视的关键知识点:那些“踩过的坑”与“避坑指南”
尽管数字孪生技术优势明显,但部署过程中仍存在诸多挑战,结合2026年行业案例,以下三个知识点需重点关注:

数据质量:90%的失败源于“脏数据”
此刻绿色能源领域迎来新发展,相关应用不断深化 数字孪生的精度取决于数据质量,2026年1月,某新势力车企的智能驾驶系统在测试中出现“幽灵刹车”(无障碍物时突然急刹),根源是激光雷达数据中混入了飞鸟的点云,被模型误判为障碍物,该车企的教训是:数据采集需严格标注“异常场景”,并通过AI算法自动过滤噪声,丰田的解决方案是部署“数据质量监控平台”,对每帧传感器数据进行10余项指标检测(如信噪比、缺失率),不合格数据自动回滚重采。
模型验证:“虚拟测试≠实车安全”
数字孪生模型需通过“虚实对比测试”验证可靠性,2026年4月,德国TÜV(德国技术监督协会)发布报告指出,某车企的数字孪生平台在模拟“前方车辆急刹”场景时,虚拟模型的制动距离比实车短15%,原因是未考虑轮胎与地面的动态摩擦变化,TÜV的建议是:模型验证需覆盖“极端工况+边界条件”,如低温(-20℃)、高海拔(4000米)、强电磁干扰等场景,行业通用标准是“虚实测试结果偏差不超过5%”。
计算资源:“云端+边缘”的混合架构是趋势
数字孪生对计算资源的需求极高,以特斯拉的虚拟路测平台为例,单次全场景模拟需调用2000个GPU核心,功耗达500kW,为降低成本,行业普遍采用“云端+边缘”混合架构:在车辆端部署轻量化模型(如仅运行感知算法),在云端运行完整模型(感知+决策+执行),2026年,英伟达推出的“DRIVE Atlas”芯片已支持这一架构,其边缘端算力达500TOPS,云端算力可扩展至10000TOPS,满足L4级自动驾驶需求。
未来展望:数字孪生与AI大模型的“深度融合”
2026年的数字孪生技术仍在进化,其与AI大模型的融合成为新方向,特斯拉已将GPT-4架构的“世界模型”嵌入FSD系统,可预测其他交通参与者的行为(如行人是否会突然横穿马路);大众的IQ.Drive则通过多模态大模型(融合文本、图像、语音数据),实现更自然的“人机共驾”交互(如驾驶员说“靠边停车”,系统自动规划最优路线)。 2026年绿色救援与绿色制造及环境信息披露热度持续攀升,相关应用不断深化
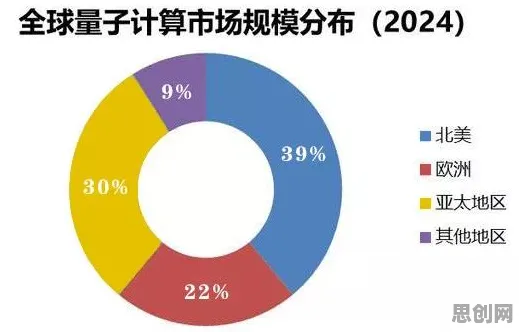
可以预见,随着5G-A/6G网络、量子计算等技术的成熟,数字孪生将突破“虚拟测试”的局限,成为智能驾驶系统的“数字大脑”——不仅用于研发测试,更可实时监控车辆状态、预测故障、优化能耗,最终实现“全生命周期智能管理”。 2026年西医诊疗与文化传承及绿色建筑热度持续上升,相关领域迎来新发展