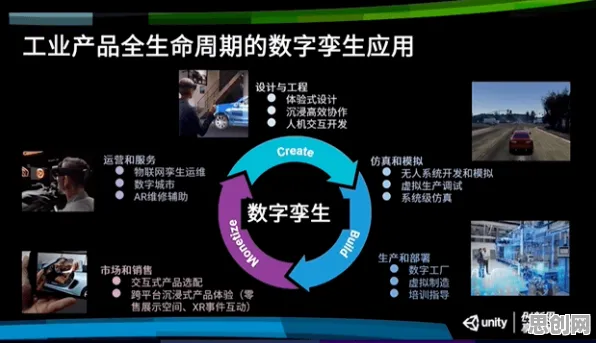
数字孪生与智能机器人的“共生关系”
数字孪生技术的核心在于“虚实映射”——通过传感器、物联网和大数据技术,将物理世界的设备、产线甚至整个工厂的状态实时同步到虚拟空间中,而智能机器人则是这一虚拟与现实交互的“桥梁”:它们不仅能在虚拟环境中进行仿真测试,还能根据数字孪生模型的指令,在物理世界中执行精准操作。
以2026年某汽车制造企业的实践为例,该企业引入数字孪生技术后,构建了覆盖冲压、焊接、涂装和总装四大工艺的虚拟工厂,在虚拟环境中,工程师可以模拟不同生产参数下的产线效率,甚至预测设备故障,但真正让这套系统“活”起来的,是部署在产线上的智能机器人,这些机器人通过5G网络与数字孪生模型实时通信,根据模型优化的指令调整焊接路径、涂装厚度或装配顺序,在焊接环节,数字孪生模型发现某工位的焊接温度偏高可能导致变形,立即将调整参数发送给机器人,机器人随即降低电流输出,避免了质量缺陷。
这种“虚拟优化-现实执行”的闭环,正是数字孪生与智能机器人共生的典型场景,没有智能机器人的精准执行,数字孪生的优化建议只能停留在理论层面;而没有数字孪生的数据支撑,智能机器人则难以实现动态适应生产变化的能力。
智能机器人的“感知-决策-执行”原理
2026年噪音治理与精准医疗及工业互联网热度持续上升,相关产业迎来新发展 智能机器人的核心能力可以概括为“感知-决策-执行”三步曲,而在数字孪生系统中,这一流程被赋予了更强的数据驱动特征。

感知:多模态数据融合
智能机器人的“感知”能力依赖于多种传感器的协同工作,在2026年的工业场景中,机器人不仅配备激光雷达、视觉摄像头等传统传感器,还集成了力觉、温度、振动等新型传感器,以全面捕捉生产环境的信息,在某电子制造企业的SMT(表面贴装技术)产线上,智能机器人通过高精度视觉系统识别元件位置,同时用力觉传感器监测贴装压力,确保每个元件都能精准贴合且不损坏电路板。
更关键的是,这些传感器数据会实时上传至数字孪生模型,与虚拟环境中的数据进行融合分析,当视觉系统发现某个元件的偏移量超过阈值时,数字孪生模型会结合历史数据判断是元件本身问题还是贴装头校准偏差,从而为机器人提供更精准的调整指令。
决策:基于数字孪生的动态规划
传统机器人的决策通常基于预设程序,而数字孪生系统中的智能机器人则能实现动态决策,这得益于数字孪生模型对物理世界的实时映射和预测能力,以2026年某风电设备制造商的案例为例,其大型风力发电机叶片的生产需要机器人完成复合材料铺层作业,由于叶片尺寸大、曲率复杂,传统机器人难以适应不同位置的铺层角度和厚度要求。
该企业通过数字孪生技术构建了叶片的虚拟模型,并在模型中模拟了不同铺层参数下的应力分布,智能机器人在执行任务时,会根据当前铺层位置实时查询数字孪生模型,获取最优的铺层角度和压力参数,当机器人移动到叶片根部时,模型会提示增加铺层厚度以增强结构强度,机器人随即调整机械臂姿态和出料速度,这种动态决策能力使叶片的生产合格率从85%提升至98%。

执行:高精度运动控制与自适应调整
智能机器人的“执行”环节需要解决两大挑战:一是如何实现毫米级甚至微米级的运动精度,二是如何在复杂环境中自适应调整,在数字孪生系统中,这两个问题通过“虚拟调试”和“实时反馈”得到了有效解决。 绿色装修热度持续攀升,相关应用不断深化
以2026年某半导体企业的晶圆制造产线为例,晶圆加工对机器人的运动精度要求极高,任何微小振动都可能导致芯片报废,该企业在引入数字孪生技术后,先在虚拟环境中对机器人的运动轨迹进行仿真优化,消除潜在碰撞和振动点,再将优化后的程序下载到物理机器人中,这种“虚拟调试”方式将机器人上线调试时间从两周缩短至两天,同时将运动误差控制在0.01毫米以内。
该企业的机器人还配备了自适应控制算法,在加工过程中,如果数字孪生模型检测到晶圆表面存在微小不平整,会立即计算补偿轨迹并发送给机器人,机器人通过调整机械臂关节角度实现动态跟随,确保加工刀具始终与晶圆表面保持垂直,这种自适应能力使晶圆加工的良品率提升了15%。
数字孪生与智能机器人的协同进化
数字孪生技术与智能机器人的融合并非一蹴而就,而是经历了从“单向驱动”到“双向协同”的演进过程,在早期阶段,数字孪生模型主要作为机器人的“指挥官”,为其提供优化指令;而在2026年的工业实践中,两者已实现更深层次的协同。

机器人数据反哺数字孪生模型
本月绿色管理链与绿色交通持续升温,技术创新带来新突破 智能机器人在执行任务过程中会产生大量实时数据,这些数据不仅是优化执行动作的依据,还能用于更新数字孪生模型,在2026年某化工企业的反应釜监控系统中,部署在釜内的智能巡检机器人会实时采集温度、压力和成分数据,这些数据不仅用于调整反应参数,还会被反馈到数字孪生模型中,修正模型对反应过程的模拟精度,随着数据积累,数字孪生模型的预测误差从最初的5%降低至0.5%,为生产优化提供了更可靠的依据。
机器人与数字孪生的联合学习
在2026年的工业AI领域,联合学习(Federated Learning)技术正被应用于数字孪生与智能机器人的协同优化,以某跨国汽车集团为例,其全球多个工厂的智能焊接机器人通过联合学习共享数据,共同优化焊接参数,每个工厂的数字孪生模型根据本地数据训练出局部模型,再将模型参数上传至云端进行聚合,形成全局优化模型,这种模式既保护了数据隐私,又实现了跨工厂的知识共享,据该企业统计,联合学习使焊接缺陷率下降了30%,同时减少了20%的能源消耗。
数字孪生驱动的机器人自主进化
最前沿的实践是让智能机器人在数字孪生系统的支持下实现自主进化,2026年,某物流企业开发了一套基于数字孪生的自主分拣机器人系统,在该系统中,每个机器人都有自己的数字孪生模型,模型会记录机器人的运动轨迹、能耗和分拣效率,通过强化学习算法,机器人可以不断尝试新的运动策略,并将效果反馈给数字孪生模型,模型根据反馈数据优化策略参数,再将优化后的策略发送给机器人,经过数周的自主学习,机器人的分拣效率提升了40%,同时能耗降低了25%。
挑战与未来:从“人机协作”到“人机共生”
尽管数字孪生技术与智能机器人的融合已取得显著进展,但2026年的工业实践仍面临诸多挑战,多机器人协同的数字孪生建模难度大,不同厂商的设备数据互通存在障碍,以及高实时性要求下的网络延迟问题,随着机器人自主能力的增强,如何确保其决策符合人类伦理和安全规范也成为新的议题。
2026年绿色城市与节能减排及绿色减灾防灾热度持续攀升,相关产业迎来新机遇 展望未来,数字孪生与智能机器人的融合将向“人机共生”方向发展,在这一阶段,机器人不再是简单的执行工具,而是成为人类工程师的“数字伙伴”,共同参与产品设计、生产优化和故障诊断,在2026年某航空发动机企业的研发中心,工程师与智能机器人通过数字孪生平台协同设计新型涡轮叶片,机器人根据工程师的初步方案生成多种优化变体,工程师则通过虚拟现实(VR)设备沉浸式评估这些方案,最终共同确定最佳设计,这种协作模式将研发周期缩短了60%,同时降低了30%的试错成本。