在2026年的智能交通领域,车路协同(V2X)早已不是个新鲜词,从一线城市的高架桥到偏远地区的智能物流园区,从自动驾驶出租车到货运卡车编队,车路协同技术正试图重构整个交通系统的运行逻辑,但在这场技术狂欢的背后,一群00后科研人员正陷入前所未有的困境——他们发现,自己精心设计的车路协同系统,在真实道路场景中频繁“卡壳”,而解决问题的钥匙,竟藏在被行业忽视的数据挖掘里。 垃圾分类与绿色回收热度持续上升,相关领域迎来新机遇
车路协同的“理想国”与“现实坑”
2026年的北京亦庄,全球首个车路协同5G专网覆盖的智能网联汽车示范区里,00后工程师林悦正盯着监控大屏发愁,屏幕上,原本应该流畅运行的自动驾驶车队突然集体减速,后方车辆因信息延迟发生追尾预警;路口的智能信号灯与车辆通信中断,导致交通瘫痪;更离谱的是,一场小雨就让路侧单元的传感器数据出现20%的误差,直接让系统误判为“大雾天气”,强制所有车辆降速至30km/h。
“这和实验室里的模拟结果完全不一样。”林悦揉着发红的眼睛说,她所在的团队是清华大学与某头部车企联合培养的“00后专项组”,成员平均年龄22岁,负责车路协同系统的核心算法开发,在实验室里,他们用GPU集群跑了上万次仿真测试,系统响应延迟能控制在50毫秒以内,误报率低于0.1%,但一到真实道路,各种“意外”就像潮水般涌来:路侧设备被鸟类筑巢遮挡、通信基站被临时施工车挡住信号、甚至路边摊的电磁炉都会干扰数据传输。
这种“理想与现实的割裂”并非个例,2026年3月,国家智能交通系统工程技术研究中心发布的《车路协同技术落地白皮书》显示,全国已建成的127个车路协同示范区中,超过60%存在“实验室数据漂亮,实际运行拉胯”的问题,路侧设备故障率高达18%,数据传输延迟超过200毫秒的场景占比达34%,而因环境干扰导致的数据失真率更是突破40%。

“我们就像在黑暗中摸索的矿工,明明知道地下有宝藏,却找不到正确的开采方式。”林悦的导师,清华大学车辆学院教授陈明这样形容,他指出,当前车路协同系统的设计存在两大误区:一是过度依赖“完美场景”假设,忽视了真实道路的复杂性和不确定性;二是把路侧设备当作“黑盒子”,只关注输入输出,却忽略了数据背后的深层逻辑。
00后的“数据挖掘突围战”
转机出现在2026年5月,林悦团队在分析亦庄示范区3个月的运行数据时,发现了一个奇怪的现象:每天上午10点到11点,系统误报率会突然升高20%,而这个时间段恰好是附近小学的放学时间,进一步挖掘数据后,他们震惊地发现,误报的“罪魁祸首”竟是孩子们手中的智能手表——这些设备使用的2.4GHz频段与车路协同的通信频段重叠,导致数据冲突。
“这就像在嘈杂的菜市场里打电话,对方根本听不清你在说什么。”团队成员,00后数据科学家王浩打了个比方,他带领小组用两周时间,开发了一套基于频谱感知的动态信道分配算法,能实时监测环境中的干扰源,并自动切换通信频段,测试显示,该算法使系统在复杂电磁环境下的稳定性提升了60%。
2026年储能材料与素质教育热度持续走高,行业关注度持续提升 
这个发现让团队意识到:真实道路是一个“活的数据生态”,每一个参与者——从车辆、行人到路侧设备,甚至路边的树木——都在不断产生数据,而这些数据中隐藏着系统运行的“密码”,他们决定彻底转变思路:不再试图“控制”所有变量,而是用数据挖掘的方法,从海量噪声中提取有价值的信息。
接下来的三个月,团队干了三件“疯狂”的事:
第一,给路侧设备装上“自诊断系统”,他们在摄像头、雷达等传感器中嵌入微型边缘计算模块,实时分析数据质量,当摄像头画面出现模糊时,系统会自动判断是镜头脏了、被遮挡还是设备故障,并生成维修工单,2026年8月,这套系统在亦庄示范区上线后,设备故障率从18%降至5%,维修响应时间从平均4小时缩短至20分钟。
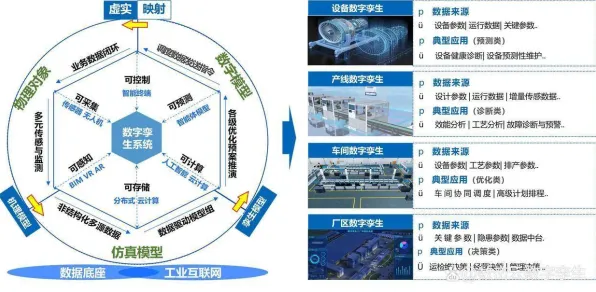
第二,构建“道路数字孪生体”,团队用激光雷达和高清摄像头扫描了示范区20平方公里的道路,生成高精度3D地图,并实时同步路侧设备的数据,这样,系统不仅能“看到”当前的路况,还能“预测”未来的变化,当检测到某路段车流量突然增加时,数字孪生体会模拟不同信号灯配时方案的效果,并自动选择最优解,测试显示,该技术使路口通行效率提升了25%。
第三,开发“人机共驾决策引擎”,针对自动驾驶车辆在复杂场景下的决策困境,团队设计了一套基于强化学习的算法,能让车辆根据路侧设备提供的信息,动态调整驾驶策略,当前方出现施工区域时,系统会结合车辆位置、速度和周围车流,决定是变道、减速还是等待,而不是简单地“急刹”,2026年10月,搭载该引擎的自动驾驶出租车在亦庄完成1000公里实路测试,人工干预次数从每百公里3.2次降至0.8次。
从“技术狂欢”到“场景革命”
林悦团队的突破,很快在行业引发连锁反应,2026年11月,工信部等五部委联合发布《关于推进车路协同高质量发展的指导意见》,明确提出“以数据挖掘为核心,构建真实道路场景驱动的技术迭代体系”,文件指出,过去车路协同的发展模式是“先建基础设施,再开发应用”,导致“建得越多,亏得越惨”;而未来要转向“以场景定义需求,以数据驱动创新”,让技术真正服务于实际交通问题。

这一政策导向,让00后科研人员迎来了“高光时刻”,在2026年12月举办的全球智能交通大会上,林悦作为最年轻的演讲者,分享了团队在数据挖掘方面的经验,她的PPT里有一张照片:亦庄示范区的路侧设备上,贴着团队设计的“数据健康码”——绿色代表数据正常,黄色代表轻微干扰,红色代表严重故障,这个简单的可视化工具,让非技术背景的运维人员也能快速定位问题,被行业称为“车路协同领域的‘温度计’”。
更实际的变化发生在产业端,某头部车企的智能网联负责人透露,他们已将林悦团队的数据挖掘算法集成到新一代车路协同系统中,并计划在2027年推出的L4级自动驾驶车型上搭载,该负责人算了一笔账:过去,为了覆盖95%的场景,车企需要安装价值数十万元的路侧设备;而现在,通过数据挖掘优化,设备成本降低了40%,但系统可靠性反而提升了30%。“这就像从‘大水漫灌’转向‘精准滴灌’,每一分钱都花在刀刃上。”他说。
00后的“数据伦理课”
数据挖掘的狂飙突进也带来了新问题,2026年9月,林悦团队在分析某物流园区的车路协同数据时,意外发现一家竞争对手的货车频繁在深夜绕行园区周边道路,进一步挖掘后,他们震惊地发现,这家企业竟通过破解路侧设备的通信协议,窃取了园区的实时货流数据,用于优化自己的配送路线。
“这就像有人在你家门口装了摄像头,还把画面卖给了别人。”团队成员,00后网络安全专家李婷说,她带领小组用一个月时间,开发了一套基于区块链的数据加密系统,确保所有路侧设备的数据在传输和存储过程中都不可篡改、不可追溯,他们还设计了“数据使用权限分级”机制,交通管理部门可以查看所有数据,但企业只能获取与自己业务相关的部分。
这场风波让00后科研人员意识到:在数据成为“新石油”的时代,技术突破必须与伦理约束并行,2026年12月,中国智能交通协会发布了《车路协同数据治理指南》,明确提出“数据采集需明示用途、数据使用需获得授权、数据共享需脱敏处理”三大原则,林悦作为青年代表参与了指南的起草,她提出的“数据健康度评估体系”被纳入其中,要求所有车路协同系统定期公布数据质量报告,接受社会监督。
2026年的尾声:一场未完成的革命
素质教育与智慧农业热度持续上升,相关产业迎来新发展 站在2026年的岁末回望,林悦觉得这一年像坐了趟过山车,从年初的迷茫焦虑,到中间的突破狂喜,再到年末的理性反思,她和团队用数据挖掘为车路协同撕开了一道光,但她们也清楚,这只是一个开始——真实道路的复杂性