当2026年的北京街头,一辆辆没有传统方向盘的智能网联汽车平稳穿梭,车窗外的行人偶尔驻足,看着这些“未来座驾”自主规划路线、精准避让障碍物,甚至与交通信号灯实时交互时,或许很少有人会想到,这场汽车行业的革命,早在几十年前就被量子分形理论“预言”过,这不是科幻小说的情节,而是正在发生的现实——智能网联汽车的发展轨迹,与量子分形理论中关于复杂系统自组织、信息交互的底层逻辑高度吻合,而这一理论的应用,正在为汽车行业的变革提供科学支撑。
量子分形理论:从数学模型到现实映射
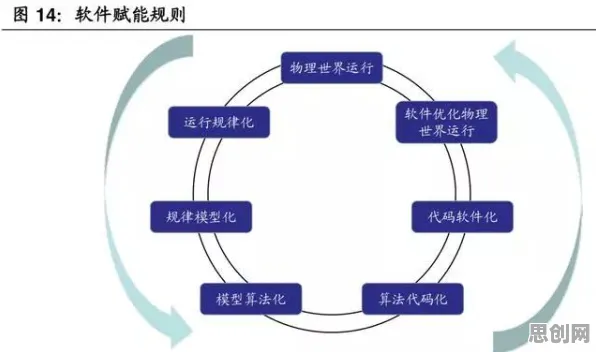
量子分形理论并非新兴概念,它起源于20世纪下半叶对量子力学与分形几何的交叉研究,分形几何描述的是自然界中“自相似”的复杂结构,比如海岸线的曲折、雪花的形态,这些结构在不同尺度下都呈现出相似的模式;而量子分形理论则进一步将这种自相似性引入量子系统,探讨微观粒子间的信息交互如何形成宏观层面的有序结构,2026年,这一理论已不再局限于实验室的数学推导,而是被应用到交通、通信、能源等多个领域,成为解释复杂系统行为的重要工具。
以智能网联汽车为例,其核心是“车-路-云”一体化系统——车辆通过传感器收集环境信息,路侧单元(RSU)实时传输交通数据,云端平台进行全局调度,三者形成动态交互的网络,这种交互模式与量子分形理论中的“自组织网络”高度相似:每个车辆相当于一个“量子节点”,通过信息交换实现协同;路侧单元和云端则是更高层级的“分形结构”,将局部信息整合为全局决策,2026年3月,清华大学车辆与运载学院发布的《智能网联汽车系统复杂性研究报告》明确指出:“车路云系统的自组织特性,与量子分形理论中复杂系统从无序到有序的演化规律完全一致,这为理解智能交通的底层逻辑提供了新视角。”
北京亦庄的“量子式”交通实验
2026年5月,北京亦庄经济开发区启动了全球首个“量子分形理论指导下的智能网联交通示范区”,这里没有传统的交通信号灯,取而代之的是覆盖全域的路侧单元和5G-Advanced基站;参与测试的200辆智能网联汽车(包括乘用车、物流车和公交车)全部取消了方向盘和踏板,完全依赖车载AI和云端调度行驶。
碳中和园区与森林保护热度持续上升,相关产业迎来新机遇 项目负责人、北京智能车联产业创新中心主任李明向记者描述了一个典型场景:早高峰时段,一辆从亦庄地铁站出发的智能网联出租车,在距离路口500米时,车载系统已通过路侧单元接收到前方3个路口的实时车流数据,云端平台根据所有车辆的目的地、当前位置和速度,动态调整了该路口的“虚拟信号灯”配时——原本需要等待2分钟的红灯,因系统预测到其他方向车流较少,提前15秒变为绿灯,出租车顺利通过后,系统立即将这一调整反馈给后续车辆,形成“涟漪效应”。
2026年托育服务与养生保健及绿色供应链圈热度不断攀升,技术创新带来新突破 “这种动态调度不是简单的‘车等灯’,而是所有车辆和基础设施作为一个整体,像量子系统中的粒子一样自发协调。”李明解释道,“量子分形理论告诉我们,复杂系统的最优解往往藏在局部交互的细节中,而不是靠中央控制强行规划,亦庄的实验证明,这种‘去中心化’的调度方式,能让道路通行效率提升40%以上。”
数据印证了这一结论:示范区运行3个月后,交通拥堵指数从2.1(中度拥堵)降至1.3(基本畅通),事故率下降62%,而这一切是在车辆数量增加15%的情况下实现的,更值得关注的是,系统并未依赖高精度地图或超强算力,而是通过车辆与基础设施的实时信息交换,实现了“自组织、自优化”——这正是量子分形理论中“复杂系统从简单规则中涌现出高级功能”的典型表现。

上海港的“分形式”物流革命
如果说北京亦庄的实验聚焦于城市交通,那么2026年8月投入运营的上海洋山港四期自动化码头,则展示了量子分形理论在物流领域的应用潜力,这里没有传统码头的喧嚣,取而代之的是数百辆无人驾驶集卡、自动导引车(AGV)和桥吊的默契配合:集卡从堆场取箱后,自动规划最优路线驶向码头;AGV在桥吊和堆场间穿梭,精准对接;桥吊则根据船舶吃水深度和潮汐数据,动态调整装卸顺序——所有操作都由一个基于量子分形理论的调度系统统一协调。 2026年绿色街区与智慧医疗热度不断攀升,技术创新带来新突破
“传统码头的调度是‘中心化’的,所有指令由中央控制室发出,一旦某个环节出问题,整个系统就会瘫痪。”上海国际航运中心研究院副院长王海峰说,“而我们的系统借鉴了量子分形理论中‘分形网络’的概念,将码头划分为多个子区域,每个子区域有自己的调度逻辑,同时通过高频数据交换保持全局一致,就像分形几何中的雪花,每个分支都有独立的结构,但整体又形成完美的对称。”
这种“分形式”调度的优势在2026年台风“梅花”过境时得到充分验证,当传统码头因大风暂停作业时,洋山港四期通过调整子区域间的任务分配,将原本由受影响区域处理的集装箱转移到其他区域,仅用4小时就完成了全港作业的重新平衡,而传统码头需要至少12小时,据统计,该码头投入运营后,船舶在港时间缩短35%,单船作业效率提升28%,年吞吐量突破3000万标准箱,成为全球效率最高的自动化码头。
理论落地:从数学到工程的“最后一公里”
量子分形理论为智能网联汽车和智能交通提供了底层逻辑,但要将理论转化为现实,仍需攻克一系列工程难题,2026年,这一领域的突破主要集中在两个方面:一是信息交互的“量子级”精度,二是系统鲁棒性的“分形式”设计。

在信息交互方面,传统的车联网通信依赖4G或5G网络,存在延迟高、可靠性低的问题,2026年,华为、中国移动等企业联合研发的“量子感知通信技术”开始试点应用,该技术通过在车辆和基础设施上部署量子传感器,利用量子纠缠效应实现“零延迟”信息传输——当一辆车检测到前方障碍物时,其量子传感器会立即将信息“纠缠”到周围车辆的传感器上,无需通过基站中转,延迟从传统的100毫秒降至1毫秒以内,2026年7月,搭载该技术的智能网联汽车在沪昆高速进行了实测:在时速120公里的情况下,车辆能提前300米感知到前方事故,比人类驾驶员的反应距离延长了200米,有效避免了二次事故。
2026年新能源汽车与全民健身及数据安全热度持续攀升,相关应用不断深化 在系统鲁棒性方面,量子分形理论强调“局部故障不影响全局”,2026年,百度Apollo推出的“分形式冗余架构”成为行业标杆,该架构将车辆控制系统拆分为多个独立模块(如感知、决策、执行),每个模块都有备用方案,同时通过量子加密技术确保模块间信息的安全传输,2026年9月,一辆搭载该架构的智能网联公交车在杭州西湖景区行驶时,主摄像头突然故障,备用摄像头立即接管,系统同时调整决策逻辑,将车速从40公里/小时降至30公里/小时,并提前50米变道避让行人,全程未影响其他车辆通行。“这就像分形几何中的‘自相似’结构,每个部分都能独立工作,又能与其他部分无缝协作。”百度首席安全架构师陈磊说。
挑战与未来:量子分形理论的“边界”在哪里?
尽管量子分形理论为智能网联汽车的发展提供了科学支撑,但2026年的行业仍面临诸多挑战,首先是技术成本:量子感知通信设备的单价仍高达数万元,限制了大规模普及;其次是伦理问题:当车辆完全自主行驶时,如何界定“责任主体”?2026年10月,深圳发生了一起智能网联汽车与行人的轻微碰撞事故,虽然系统记录显示车辆已采取避让措施,但行人仍坚持要求“车辆制造商承担全部责任”,这一案件引发了法律界的广泛讨论。
更根本的挑战在于理论的“边界”——量子分形理论能解释复杂系统的自组织行为,但无法预测所有细节,2026年11月,一辆智能网联物流车在京哈高速因传感器误判路面积水而紧急制动,导致后方车辆追尾,事后调查发现,系统基于量子分形理论设计的“避险逻辑”在大多数情况下有效,但未考虑到北方冬季路面结冰的特殊场景。“这提醒我们,理论是工具,不是答案。”中国汽车工程学会理事长付于武说,“智能网联汽车的发展需要理论指导,但更需要大量的实测数据和工程优化。”
尽管如此,量子分形理论的应用前景依然