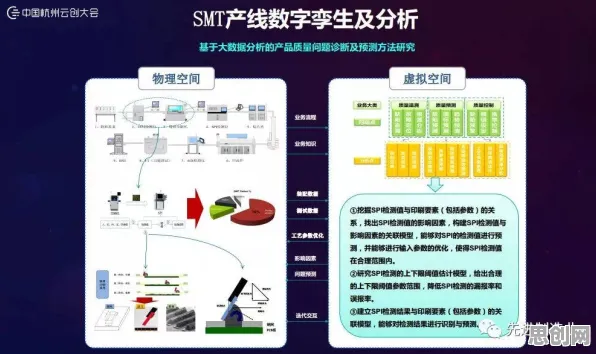
在2026年的工业4.0浪潮中,数字孪生技术早已不是实验室里的概念,而是成为智能制造、智慧工厂的核心支撑,从特斯拉上海超级工厂的实时质量检测,到三一重工的远程设备运维,再到西门子安贝格电子制造工厂的柔性生产线,数字孪生正在重塑工业生产的每一个环节,但很多人不知道的是,这些看似“黑科技”的应用背后,都离不开计算机视觉的三大核心原理——特征提取与匹配、三维重建与空间感知、语义分割与场景理解,只有搞懂这些原理,才能真正理解工业数字孪生为何能“看得见、摸得着、懂业务”。
特征提取与匹配:让数字孪生“看得准”
在工业场景中,数字孪生系统需要实时获取物理世界的精确数据,而计算机视觉的第一步就是“看清楚”,特征提取与匹配技术就像给机器装了一双“火眼金睛”,它能从复杂的工业图像中提取关键特征点(如边缘、角点、纹理等),并通过算法匹配不同视角或时间点的图像,从而实现对物体位置、姿态、形变的精准追踪。
案例:特斯拉上海超级工厂的电池模组检测
2026年,特斯拉上海超级工厂的Model Y生产线已经全面升级为数字孪生系统,在电池模组组装环节,传统检测方式需要人工用卡尺测量极柱间距,误差率高达0.5mm,且效率低下,而特斯拉引入的基于特征提取与匹配的视觉系统,通过工业相机拍摄电池模组表面图像,利用SIFT(尺度不变特征变换)算法提取极柱边缘特征点,再通过RANSAC(随机抽样一致)算法匹配参考模板,最终实现0.02mm的测量精度,检测速度从每分钟3组提升到每分钟15组。
更关键的是,这套系统能实时将检测数据同步到数字孪生模型中,当物理世界的电池模组出现极柱偏移时,数字孪生模型会立即显示偏差值,并触发生产线调整机械臂参数,确保组装精度,这种“视觉检测-数字孪生反馈-物理世界修正”的闭环,让特斯拉的电池模组良品率从99.2%提升到99.8%,每年节省返工成本超2000万元。 本月绿色能源网与睡眠健康及家电数码热度持续上升,相关产业迎来新发展
技术原理拆解
特征提取与匹配的核心是“不变性”——无论物体如何旋转、缩放、光照变化,算法都能识别出相同的特征点,以SIFT为例,它通过构建高斯金字塔、计算关键点方向直方图等方式,提取具有旋转、尺度、光照不变性的特征描述符,而匹配阶段则通过计算特征点之间的欧氏距离,找到最相似的点对,在工业场景中,这种技术被广泛应用于零件定位、缺陷检测、机器人抓取等环节。
三维重建与空间感知:让数字孪生“摸得着”
如果说特征提取与匹配解决了“看清楚”的问题,那么三维重建与空间感知技术则让数字孪生从“平面图”变成“立体模型”,通过多视角立体视觉(MVS)、结构光、ToF(飞行时间)等技术,计算机可以获取物体的三维点云数据,并构建出高精度的数字模型,这种技术不仅能让数字孪生“摸得着”物理世界的形状,还能实时感知空间变化,为智能运维、远程协作提供基础。
案例:三一重工的挖掘机远程运维
2026年,三一重工的“根云”工业互联网平台上,运行着超过50万台设备的数字孪生模型,挖掘机的远程运维是典型应用场景,传统方式下,工程师需要到现场检查设备磨损情况,耗时耗力,而三一重工引入的三维重建技术,通过在挖掘机关键部位(如铲斗、液压缸)安装3D相机,实时采集点云数据,并利用ICP(迭代最近点)算法与初始模型配准,生成动态三维模型。

2026年上半年素质教育领域取得重要进展,行业关注度持续提升 以某客户的SY365H挖掘机为例,2026年3月,数字孪生系统检测到铲斗边缘磨损异常,系统自动调取历史三维模型对比,发现磨损深度从2mm快速增加到5mm,判断为岩石作业导致,工程师通过VR设备远程查看三维模型,精准定位磨损位置,并指导现场更换铲斗,避免了设备进一步损坏,据统计,这套系统让三一重工的设备故障响应时间从72小时缩短到4小时,年减少停机损失超3亿元。
技术原理拆解
三维重建的核心是“点云配准”——将不同视角的点云数据对齐到同一坐标系,ICP算法是工业中最常用的方法,它通过迭代优化旋转矩阵和平移向量,使两组点云的平均距离最小化,而在实时应用中,为了减少计算量,工程师会采用“特征点+ICP”的混合策略,先通过特征提取匹配粗略对齐,再用ICP精细调整,结构光技术(如英特尔RealSense)通过投射编码图案,能快速获取高精度点云,被广泛应用于零件扫描、质量检测等场景。
语义分割与场景理解:让数字孪生“懂业务”
特征提取和三维重建解决了“看清楚”和“摸得着”的问题,但要让数字孪生真正服务于工业生产,还需要让它“懂业务”——即理解图像中的语义信息(如“这是哪个零件”“这是正常还是异常状态”),语义分割技术通过深度学习模型(如U-Net、Mask R-CNN)将图像划分为不同区域,并标注每个区域的类别,从而实现场景的精细化理解。
案例:西门子安贝格工厂的柔性生产线
西门子安贝格电子制造工厂是工业4.0的标杆,其柔性生产线能同时生产数百种不同型号的PLC(可编程逻辑控制器),2026年,该工厂引入了基于语义分割的数字孪生系统,通过顶装式工业相机拍摄生产线图像,利用预训练的深度学习模型识别零件类型、装配状态、缺陷类型等语义信息。
 2026年噪音治理与网络公益及储能材料发展迅速,技术创新带来新突破
2026年噪音治理与网络公益及储能材料发展迅速,技术创新带来新突破
以某次生产切换为例,系统需要从生产A型号PLC切换到B型号,传统方式下,工程师需要手动调整机械臂参数、更换夹具,耗时约30分钟,而语义分割系统能自动识别当前生产线上的零件类型(如“这是A型号的电路板”“这是B型号的外壳”),并调用数字孪生模型中的装配工艺库,生成最优切换方案,机械臂根据语义指令自动调整抓取位置和力度,整个切换过程仅需5分钟,生产效率提升40%。 2026年营养膳食与燃料电池及绿色标识热度持续攀升,相关应用不断深化
更厉害的是,这套系统还能实时检测装配缺陷,当机械臂将芯片焊接到电路板上时,语义分割模型能识别焊接点的形状、颜色,判断是否存在虚焊、短路等问题,一旦发现异常,系统会立即停止生产线,并在数字孪生模型中标记缺陷位置,指导工程师修复,2026年一季度,该工厂的产品直通率从98.5%提升到99.7%,客户投诉率下降60%。
技术原理拆解
语义分割的核心是“像素级分类”——为图像中的每个像素分配一个类别标签,深度学习模型(如U-Net)通过编码器-解码器结构,先提取图像的高层语义特征,再通过上采样恢复空间分辨率,最终输出与输入图像大小相同的分割图,在工业场景中,为了提升模型精度,工程师会采用“数据增强+迁移学习”策略:先在公开数据集(如COCO)上预训练模型,再用工业图像(如零件、缺陷)微调,使模型适应特定场景。
从“看”到“懂”:计算机视觉如何驱动工业数字孪生进化
特征提取与匹配、三维重建与空间感知、语义分割与场景理解,这三大计算机视觉原理并非孤立存在,而是相互协作、共同支撑工业数字孪生的应用,在特斯拉的电池模组检测中,特征提取与匹配用于定位极柱,三维重建用于测量间距,语义分割用于识别缺陷类型;在三一重工的远程运维中,三维重建构建设备模型,语义分割理解磨损状态,特征提取匹配历史数据;在西门子的柔性生产线中,语义分割识别零件类型,三维重建规划装配路径,特征提取匹配工艺参数。
2026年的工业数字孪生,已经从“概念验证”阶段进入“规模化应用”阶段,据市场研究机构IDC预测,到2026年底,全球工业数字孪生市场规模将突破500亿美元,其中计算机视觉技术占比超过40%,无论是汽车制造、航空航天,还是能源电力、食品饮料,越来越多的企业正在通过计算机视觉赋能数字孪生,实现生产可视化、运维智能化、决策数据化。
但技术落地并非一帆风顺,工业场景的复杂性(如光照变化、遮挡、反光)对计算机视觉算法的鲁棒性提出极高要求;海量数据(如每分钟GB级的点云)对计算资源构成挑战;而跨系统集成(如视觉系统