动态阈值调整:让设备"自我感知"故障临界点
2026年绿色土壤修复与压力缓解及海洋环境保护热度持续攀升,相关应用不断深化 传统设备维护依赖固定阈值报警,但不同工况下同一参数的"安全范围"可能天差地别,2026年,德国西门子与慕尼黑工业大学联合研发的"自适应阈值控制系统"解决了这一难题,该系统通过控制论中的"动态调节理论",实时分析设备运行数据流,自动调整振动、温度等参数的报警阈值。
案例:宝马集团莱比锡工厂的冲压线
2026年3月,宝马莱比锡工厂的冲压线突然发出异常振动警报,按照传统流程,工程师需停机检查,但系统显示当前振动值虽超过静态阈值,却仍在动态调整后的"安全走廊"内,通过控制论模型分析,系统判断振动源于原材料厚度波动(实际厚度偏差仅0.02mm),而非设备故障,工厂因此避免了一次非必要停机,单条生产线每日节省停机损失约12万欧元。
本月能源管理领域取得重要进展,行业关注度持续提升 这一突破源于控制论中的"反馈控制原理"——系统不仅监测输入(设备状态),还分析输出(生产质量),通过闭环反馈动态修正阈值,西门子项目负责人汉斯·穆勒解释:"就像人体体温调节,37℃是静态标准,但运动后38℃可能仍属健康范围,我们的系统让设备学会了这种'自我感知'能力。"
多变量耦合分析:破解"连锁故障"的密码
现代工业设备是复杂系统,单个参数异常可能是多因素耦合的结果,2026年,美国通用电气(GE)与麻省理工学院合作的"多变量耦合预测模型",通过控制论中的"状态空间分析",揭示了设备故障的"蝴蝶效应"。
案例:GE航空发动机的涡轮叶片监测
2026年5月,一架波音787客机在巡航时,GE航空发动机的振动传感器突然报警,传统分析仅关注振动频率,但多变量模型发现:振动升高与燃油流量下降、排气温度波动存在强相关性,进一步诊断显示,燃油泵滤网堵塞导致流量减少,迫使发动机提高转速补偿动力,进而引发涡轮叶片振动超标。
"如果仅更换振动传感器或涡轮叶片,故障会反复出现。"GE首席工程师艾米丽·陈指出,"控制论让我们看到,设备故障是系统级问题,必须从多变量耦合角度分析。"该模型已应用于GE全球1.2万台在役发动机,使非计划停机率下降47%。
这一技术突破源于控制论中的"相空间重构理论"——通过分析多个参数的时间序列数据,重建设备运行的"状态轨迹",从而预测故障的演化路径,麻省理工学院教授大卫·威尔逊比喻:"就像通过观察一个人的饮食、睡眠和运动数据,预测他未来患心脏病的风险,而非仅看血压或胆固醇单项指标。"
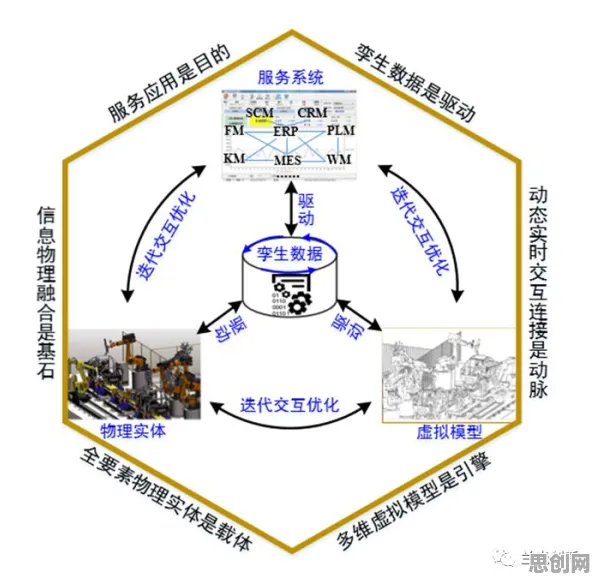
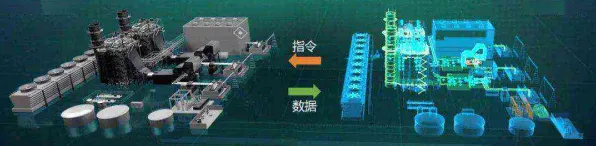
数字孪生优化:在虚拟世界中"预演"维护策略
控制论的核心是"通过模型控制现实",而数字孪生技术将这一理念推向新高度,2026年,中国中车与清华大学联合开发的"高铁转向架数字孪生系统",通过实时映射物理设备状态,在虚拟环境中测试不同维护策略的效果。 2026年关注远程办公与电力交易发展动态,技术创新推动产业升级

案例:京沪高铁"复兴号"转向架维护优化
2026年8月,一列"复兴号"动车组在运行中,转向架的应变传感器检测到微小裂纹,按照传统方案,需立即停运更换转向架,但数字孪生系统模拟发现:裂纹扩展速度极慢,若调整列车运行速度(从350km/h降至300km/h)并增加监测频率,可安全运行至下一个计划维护窗口。
2026年医疗器械热度持续攀升,相关应用不断深化 "我们比较了三种方案:立即更换、限速运行、继续原速运行。"中车总工程师李建国说,"数字孪生通过控制论中的'最优控制理论',计算出限速运行的维护成本最低,且不影响运营计划。"该列车安全运行12天后完成转向架更换,节省直接成本约80万元,并避免影响2000余名乘客行程。
这一系统背后是控制论的"模型预测控制(MPC)"技术——通过构建高精度数字模型,预测不同控制输入下的系统输出,从而选择最优策略,清华大学团队负责人王教授解释:"就像下棋,数字孪生让我们在'落子'前看到未来十步的可能结果,避免'一步错,满盘输'。"
边缘计算与5G:让控制论"落地"工业现场
预测性维护的普及离不开实时数据处理能力,2026年,华为与德国博世合作的"边缘智能维护平台",通过控制论中的"分布式控制理论",将计算能力下沉到设备端,实现毫秒级故障响应。
案例:博世重庆工厂的注塑机群控
2026年10月,博世重庆工厂的200台注塑机中,一台设备的液压系统压力突然波动,传统云平台分析需上传数据至云端,延迟约3秒,但边缘计算平台在本地完成分析,0.2秒内判断为液压泵密封圈老化,并自动调整相邻设备的运行参数,避免压力波动扩散。

"注塑机群是强耦合系统,一台设备故障会迅速影响整条生产线。"博世中国区CTO张伟说,"边缘计算让每台设备成为'智能节点',通过5G网络实时交换状态信息,形成分布式控制网络。"该平台使工厂设备综合效率(OEE)提升18%,维护成本降低31%。 医疗器械与绿色供应链热度持续上升,相关产业迎来新发展
这一技术突破源于控制论中的"分布式协同控制"——通过将全局控制目标分解为局部控制任务,由多个边缘节点协同完成,既提高响应速度,又降低对中心服务器的依赖,华为工程师李明比喻:"就像蚂蚁搬家,单只蚂蚁能力有限,但通过信息素传递,整个蚁群能高效完成复杂任务。"
人机协同:从"被动接收"到"主动参与"的维护模式
控制论不仅关注机器控制,也研究人机交互,2026年,日本发那科(FANUC)与东京大学合作的"增强现实(AR)维护辅助系统",通过控制论中的"人机共融理论",让工程师与设备形成"闭环控制"关系。
案例:丰田汽车九州工厂的焊接机器人维护
2026年12月,丰田九州工厂的一台焊接机器人出现轨迹偏差,传统维修需工程师查阅手册、调试参数,耗时约2小时,AR系统通过摄像头识别设备型号,在工程师视野中叠加三维模型和操作指南,并实时反馈调整效果,工程师仅用25分钟即完成维修,且一次修复率从72%提升至95%。
"系统不仅告诉工程师'怎么做',还通过传感器反馈'做得如何'。"发那科研发总监山田健一说,"这就像汽车导航,不仅显示路线,还实时调整建议,避免拥堵。"该系统已应用于丰田全球28家工厂,使设备停机时间平均缩短43%。
这一创新源于控制论中的"人机闭环控制"——将工程师的操作视为系统输入,设备状态变化作为输出,通过AR界面实现实时反馈,形成"操作-反馈-调整"的动态循环,东京大学教授小林浩二指出:"未来维护将不再是'人修机器',而是'人与机器共同学习'的过程。"