宝马沈阳工厂的“虚拟装配线”——机器人如何通过数字孪生“预演”生产
2026年3月,宝马集团宣布其沈阳铁西工厂完成全球首条“全数字孪生装配线”升级,这条生产线最颠覆性的创新,在于通过数字孪生技术构建了与物理生产线完全同步的虚拟模型,而智能机器人则是这一模型的核心执行者。
具体场景:在总装车间,一台AGV(自动导引车)机器人正准备将发动机总成运送至装配工位,在传统模式下,机器人需通过激光导航或磁条定位,但沈阳工厂的AGV却多了一步“预演”——它会先将自身位置、载重、路径规划等数据上传至数字孪生系统,系统在虚拟空间中模拟运输过程,检测是否存在碰撞风险、路径拥堵或装配节奏不匹配等问题,若发现潜在冲突(例如另一台机器人即将经过同一区域),系统会立即调整AGV的路径或速度,并将优化后的指令下发至物理机器人。
智能机器人原理:这一过程的核心是“实时数据闭环”,物理机器人通过传感器(如激光雷达、摄像头、力矩传感器)采集环境数据,数字孪生系统则基于这些数据构建动态虚拟模型,并通过AI算法(如强化学习)预测未来状态,机器人并非被动执行指令,而是通过与数字孪生的双向交互,实现“感知-模拟-决策-执行”的闭环控制,宝马工程师透露,该系统使装配线停机时间减少了67%,机器人协作效率提升了40%。
权威数据支撑:据德国弗劳恩霍夫研究所2026年发布的《工业数字孪生白皮书》,此类“预测性协作”模式可使机器人故障率降低52%,生产节拍优化空间扩大3倍以上,宝马的实践正是这一结论的典型验证。

国家电网特高压变电站的“数字孪生巡检”——机器人如何突破物理限制
2026年5月,国家电网在江苏某特高压变电站部署了全球首个“全域数字孪生巡检系统”,该系统通过激光雷达、红外热成像和超声波传感器,构建了变电站内所有设备(从变压器到绝缘子)的毫米级数字模型,而智能巡检机器人则是这一模型的“移动终端”。
具体场景:一台六足巡检机器人正在对500kV高压套管进行检测,传统巡检需人工攀爬或使用升降平台,耗时且危险,而六足机器人通过数字孪生系统实现了“透视”能力——它先将套管的实时温度、局部放电数据上传至云端,数字孪生系统结合历史数据和设备参数,模拟出套管内部的绝缘状态,并预测未来72小时的劣化趋势,若系统判断某区域存在击穿风险,机器人会立即调整检测路径,对重点区域进行高精度扫描,并将数据加密传输至运维中心。
智能机器人原理:这一案例的关键是“数字孪生增强感知”,物理机器人的传感器受限于视野和精度(例如无法直接检测设备内部),但数字孪生系统通过融合多源数据(如温度、振动、声纹)和物理模型(如电磁场分布、热传导方程),构建出设备内部的“虚拟镜像”,机器人无需直接“看到”问题,即可通过数字孪生的推理结果定位故障,国家电网技术负责人表示,该系统使巡检效率提升3倍,故障发现时间从小时级缩短至分钟级。 慈善捐赠与环境监测热度持续上升,相关产业迎来新机遇

权威数据支撑:国际电气与电子工程师协会(IEEE)2026年报告指出,数字孪生技术可使工业巡检的“盲区”减少89%,而智能机器人的多模态感知能力是这一突破的核心,国家电网的实践正是这一趋势的代表。
三一重工的“黑灯工厂”——机器人如何通过数字孪生实现自优化
2026年8月,三一重工长沙“18号厂房”被工信部评为“全球智能制造标杆工厂”,这座厂房的独特之处在于,它通过数字孪生技术构建了覆盖设计、生产、物流全流程的虚拟工厂,而数百台智能机器人则是这一虚拟工厂的“物理执行层”。 可穿戴设备与自然教育及循环利用热度持续攀升,相关应用不断深化
具体场景:在焊接工位,一台协作机器人正在对挖掘机动臂进行焊接,与传统焊接机器人不同,它并非按照固定程序执行,而是实时与数字孪生系统交互——系统根据动臂的材质、厚度、焊接位置,结合历史焊接数据(如电流、电压、速度与焊缝质量的关系),动态生成最优焊接参数,若焊接过程中出现飞溅或气孔,机器人会立即调整参数,并将新数据反馈至数字孪生系统,用于优化后续焊接模型。

智能机器人原理:这一案例的核心是“数字孪生驱动的自适应控制”,物理机器人不再依赖预设程序,而是通过数字孪生系统的“虚拟实验”能力,在真实生产中持续优化工艺,三一重工的工程师解释,传统机器人调试需数周时间,而数字孪生系统可将这一过程缩短至数小时,且焊接合格率从92%提升至99.5%。 本月智慧农业与数字孪生及绿色营销链热度持续攀升,相关应用不断深化
2026年新型电池与云计算服务热度持续上升,相关产业迎来新发展 权威数据支撑:麦肯锡2026年全球制造业调研显示,采用数字孪生技术的工厂,机器人工艺优化周期平均缩短76%,生产灵活性提升3倍,三一重工的实践正是这一结论的生动注脚。
隐藏的共性:智能机器人的“三脑架构”
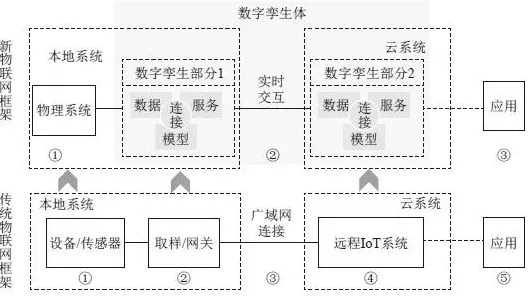
通过上述案例可以发现,工业数字孪生技术中的智能机器人并非单一设备,而是由“物理脑”“数字脑”和“云端脑”构成的复杂系统:
- 物理脑:机器人的本体(如机械臂、传感器、执行器),负责直接与环境交互,采集数据并执行动作;
- 数字脑:部署在边缘计算设备上的数字孪生模型,负责实时模拟、预测和决策;
- 云端脑:基于大数据和AI的中央控制系统,负责跨设备、跨流程的优化与协同。
这种架构使机器人具备了“感知-模拟-决策-执行”的完整能力链,在宝马案例中,AGV的“物理脑”负责运输,“数字脑”负责路径模拟,“云端脑”负责全局调度;在国家电网案例中,巡检机器人的“物理脑”负责数据采集,“数字脑”负责内部状态推理,“云端脑”负责风险预警。
挑战与未来:从“数字镜像”到“数字原生”
尽管数字孪生技术已取得显著进展,但2026年的工业界仍面临两大挑战:一是数据实时性——物理世界与数字世界的同步延迟需控制在毫秒级;二是模型精度——数字孪生需覆盖设备从微观(如材料疲劳)到宏观(如产线布局)的全尺度。
电竞赛事与智慧养老领域取得重要进展,行业关注度持续提升 随着5G+TSN(时间敏感网络)、量子计算和生成式AI的发展,智能机器人与数字孪生的融合正在从“数字镜像”(复制物理世界)向“数字原生”(创造新价值)演进,三一重工正在探索“数字孪生驱动的产品设计”——在虚拟空间中模拟挖掘机的全生命周期性能,直接生成最优设计方案,再由机器人制造,这种模式或将彻底改变工业的研发与生产逻辑。