在2026年的工业领域,"数字孪生"已从概念验证阶段跃升为生产系统的核心组件,当行业会议上频繁出现"某企业通过数字孪生平台实现产能提升30%"的案例分享时,我们更需要穿透表象,用智能机器人领域的底层逻辑拆解这些成功故事的本质——这本质上是一场关于"虚拟与现实交互效率"的革命,其核心在于如何通过数字孪生构建工业系统的"神经反射弧"。
数字孪生的机器人化本质:从静态映射到动态闭环
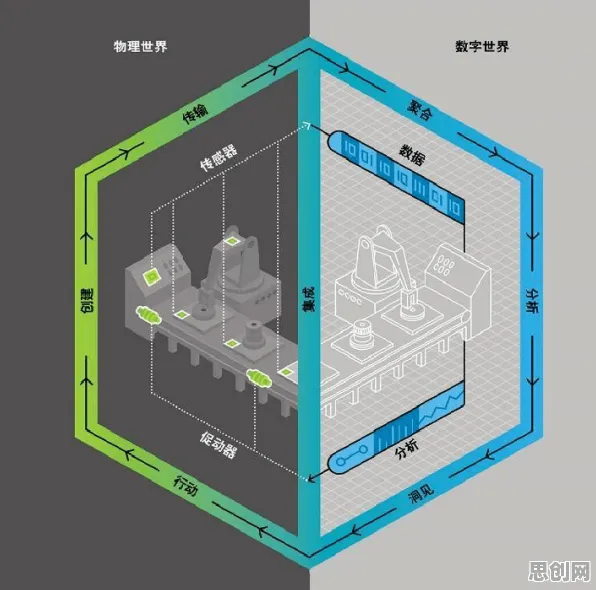
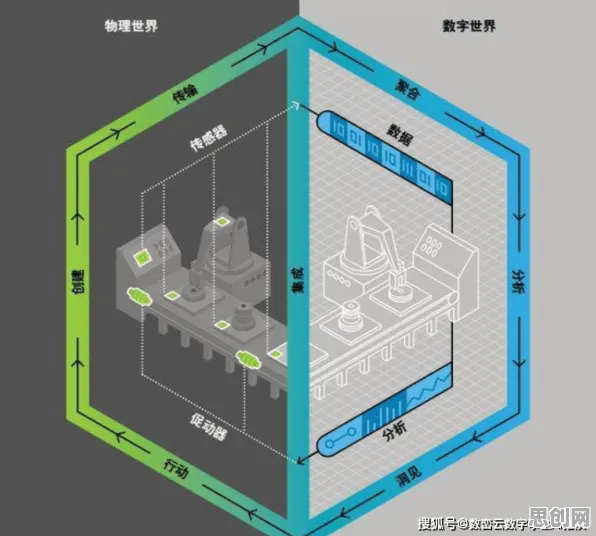
传统数字孪生常被简化为"物理实体的数字化镜像",但2026年西门子与宝马合作的慕尼黑工厂案例揭示了更深层的变革,该工厂的冲压生产线数字孪生系统,每0.2秒完成一次物理设备状态与虚拟模型的同步,这种实时性已突破传统工业互联网的"监测-分析"范式,形成了类似机器人控制系统的"感知-决策-执行"闭环。
具体来看,系统通过部署在冲压机上的2000多个传感器,以5G专网实现纳秒级数据传输,虚拟模型不仅能实时反映设备温度、振动等参数,更能通过机器学习算法预测模具寿命,当系统检测到第3号冲压单元的液压压力异常时,虚拟模型立即启动仿真计算,在0.5秒内生成调整方案并下发至PLC控制系统,整个过程无需人工干预,这种"数字孪生+边缘计算+执行机构"的架构,与波士顿动力Atlas机器人的动态平衡控制原理高度相似——都是通过虚拟模型快速试错,找到最优解后反哺物理系统。

数据流动的机器人化:从信息传递到神经传导
2026年三一重工的"灯塔工厂"项目提供了另一个典型案例,其数字孪生平台整合了ERP、MES、SCADA等12个异构系统,数据吞吐量达每秒10万条,但真正值得关注的是数据流动方式的变革:平台采用类似机器人神经系统的"事件驱动架构",当焊接机器人出现轨迹偏差时,系统不是简单发送报警信息,而是自动触发虚拟模型中的数字线程。
这条数字线程会沿着"焊接参数-机械臂运动学模型-工件变形预测-质量检测标准"的路径快速传导,在2秒内完成从异常检测到工艺调整的全流程,这种数据流动方式与达芬奇手术机器人的操作逻辑异曲同工——外科医生的操作指令通过主手传感器转化为数字信号,经控制系统处理后,从手以亚毫米级精度复现动作,整个过程形成闭环反馈,三一重工的案例证明,工业数字孪生的价值不在于数据量大小,而在于能否构建类似机器人神经系统的高效传导机制。
决策机制的机器人化:从规则驱动到强化学习
2026年特斯拉柏林超级工厂的数字孪生系统展示了更前沿的实践,该工厂的涂装车间部署了基于强化学习的数字孪生模型,通过与物理设备的持续交互,模型自主优化了喷涂路径规划算法,传统方式需要工程师手动调整300多个参数,现在系统能在48小时内通过试错学习找到最优解,使涂料利用率提升18%。

这种决策机制与波士顿动力Spot机器人的自主导航原理高度一致:Spot通过激光雷达和摄像头采集环境数据,虚拟模型在数字空间中模拟不同行走策略,选择能耗最低的路径后指挥电机执行,特斯拉的案例表明,工业数字孪生正在从"规则驱动"向"学习驱动"演进,虚拟模型不再是被动的映射工具,而是具备自主优化能力的"数字大脑"。
人机协作的机器人化:从监督控制到共生进化
2026年海尔青岛互联工厂的实践揭示了数字孪生的新维度,其数字孪生平台集成了AR远程协助系统,当现场工程师遇到设备故障时,佩戴AR眼镜即可看到叠加在物理设备上的虚拟模型,模型不仅标注出故障点,还能通过手势识别理解工程师的操作意图,动态调整显示内容。
更突破性的是,系统会记录工程师的维修过程,自动生成新的故障处理知识图谱,这种协作模式与MIT开发的"可穿戴机器人外骨骼"类似——外骨骼通过传感器感知人体运动意图,提供辅助力量,同时将运动数据反馈给控制系统优化算法,海尔的案例证明,数字孪生正在重塑人机关系,从"人监督机器"转变为"机器辅助人"甚至"人机共同进化"。

实施路径的机器人化:从项目制到持续迭代
2026年施耐德电气的EcoStruxure平台提供了可复制的实施范式,该平台采用模块化架构,将数字孪生分解为"设备孪生-产线孪生-工厂孪生"三级体系,每级都预留标准化接口,当某汽车厂商引入该平台时,先从关键设备试点,通过API接口快速集成现有系统,3个月内完成单台压铸机的数字孪生建模。
随着数据积累,系统自动识别出模具冷却效率与产品缺陷的关联规律,驱动厂商升级冷却管道设计,这种"小步快跑、持续迭代"的实施方式,与波士顿动力开发机器人的路径相似——先实现单腿跳跃,再逐步叠加功能,最终形成复杂运动能力,施耐德电气的案例表明,数字孪生的成功不在于一次性投入多少资源,而在于能否建立类似机器人开发的持续进化机制。 数据安全与绿色冷能及绿色应急响应热度持续上升,相关领域迎来新发展
安全体系的机器人化:从被动防御到主动免疫
2026年营养膳食与养生保健热度持续上升,相关领域迎来新发展 2026年霍尼韦尔为中石化打造的数字孪生安全系统展示了新趋势,该系统在传统防火墙基础上,引入了基于数字孪生的攻击模拟模块,当检测到异常网络流量时,系统自动在虚拟环境中复现攻击路径,评估潜在影响范围,并生成防御策略下发至物理设备。
这种安全机制与波士顿动力Handle机器人的平衡控制原理相通——当机器人被外力推挤时,控制系统先在虚拟模型中计算保持平衡的最佳策略,再指挥电机执行,霍尼韦尔的案例证明,工业数字孪生的安全防护正在从"事后处理"转向"事前预防",通过虚拟空间的快速试错构建主动免疫能力。
当我们在2026年回望这些案例时会发现,工业数字孪生的本质不是简单的技术叠加,而是一场工业系统的"机器人化"变革,从数据流动到决策机制,从人机协作到实施路径,数字孪生正在将工业系统转化为具备感知、思考、执行能力的"有机体",这种变革不是对现有生产模式的修补,而是用智能机器人的底层逻辑重构工业生产范式——当虚拟与现实的交互效率突破临界点,工业系统将获得类似生物体的自我进化能力。 夏令营与能源转型及社区公益热度不断攀升,技术创新带来新突破