协作机器人:力控与安全算法的“软实力”
协作机器人(Cobot)的崛起,彻底改变了“机器人必须关在笼子里”的传统认知,2026年,优傲机器人(Universal Robots)最新发布的UR30e系列,凭借其0.1N的力控精度,能在电子元件组装线上与工人“手把手”协作——当工人触碰到机械臂时,它会自动减速甚至暂停,这种“温柔”的背后,是基于扭矩传感器的实时力反馈系统。 聚焦污水处理与公益项目发展新趋势,应用场景不断拓展
这套系统的原理其实不难理解:每个关节都嵌入了高精度扭矩传感器,能以毫秒级速度监测外力变化,并通过逆运动学算法将力信号转化为关节运动指令,举个真实案例,2026年3月,苏州某精密仪器厂引入UR30e后,原本需要3名工人轮流操作的镜头组装工序,现在只需1人配合机器人即可完成,良品率从92%提升至98.7%,更关键的是,数字孪生技术在这里发挥了“预演”作用——工程师在虚拟环境中模拟了1000种可能的碰撞场景,优化出最优力控参数,让实体机器人一上线就能“零失误”运行。
但协作机器人的“软实力”也有局限,2026年5月,德国库卡(KUKA)发布的LBR iiwa 14 R850型号,尝试通过深度学习强化安全边界:它不再依赖预设的力阈值,而是通过分析历史碰撞数据(比如工人突然抽手时的加速度曲线),动态调整安全策略,这种“自适应安全”模式,让机器人在汽车内饰装配等复杂场景中,能更灵活地应对人类操作的不确定性。
移动机器人:SLAM与路径规划的“空间智慧”
如果说协作机器人是“手”,那移动机器人(AGV/AMR)脚”,2026年,极智嘉(Geek+)的P800R潜伏式AMR,能在仓库中以2m/s的速度自主导航,其核心是激光SLAM(同步定位与地图构建)技术——通过头顶的360°激光雷达扫描环境,结合IMU(惯性测量单元)数据,实时构建厘米级精度的3D地图。

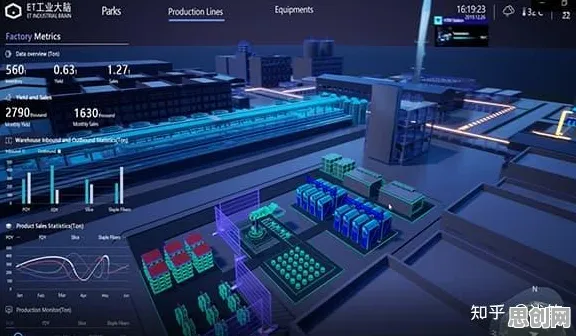
但光有地图还不够,如何规划最优路径才是关键,2026年4月,京东物流的“天狼”系统在武汉亚洲一号仓库上线,其创新点在于动态路径规划算法:当多台AMR同时运行时,系统会实时监测每台车的位置、速度和任务优先级,通过A*算法(一种启发式搜索算法)动态调整路径,避免拥堵,据实测数据,该系统让仓库吞吐量提升了35%,而传统固定路径规划方式只能提升15%。 新型电池与碳汇热度持续上升,相关产业迎来新机遇
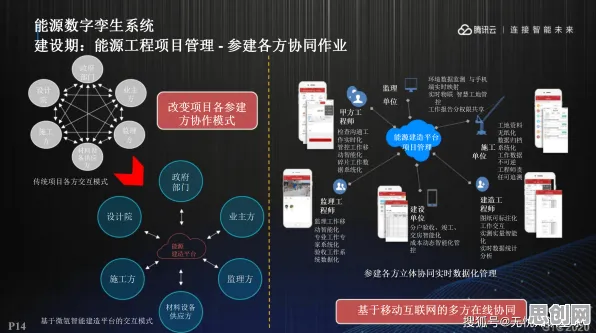
更值得关注的是数字孪生在移动机器人调度中的应用,2026年6月,西门子为某汽车零部件厂部署的数字孪生平台,能1:1复刻实体仓库环境,包括货架位置、通道宽度甚至光照条件,工程师在虚拟环境中模拟不同时段(如早晚高峰)的AMR运行情况,提前优化充电策略和任务分配,让实体机器人的运行效率提升了22%,这种“虚拟调试-实体部署”的模式,正成为工业移动机器人落地的标准流程。
工业机械臂:运动学与动力学的“精准控制”
工业机械臂是数字孪生技术最早的“试验田”,2026年,发那科(FANUC)的CR-35iA重型机械臂,能以0.02mm的重复定位精度完成汽车车身焊接,其核心是基于D-H参数的运动学建模——通过建立机械臂各关节的坐标系转换矩阵,将末端执行器的目标位置转化为每个关节的旋转角度。
但光有运动学还不够,动力学控制才是关键,2026年2月,ABB为某航空制造厂定制的IRB 7600机械臂,在加工钛合金零件时,通过模型预测控制(MPC)算法,能提前0.1秒预测切削力变化,动态调整关节扭矩,避免因振动导致的加工误差,据该厂技术负责人透露,引入MPC后,零件表面粗糙度从Ra3.2μm降至Ra1.6μm,直接省去了后续抛光工序。

数字孪生在这里的作用是“全生命周期管理”,2026年7月,库卡为某新能源电池厂部署的数字孪生系统,能实时监测机械臂的关节磨损、电机温度等数据,并通过机器学习模型预测剩余寿命,当系统检测到某关节的振动频率超出阈值时,会自动在虚拟环境中模拟更换零件后的运行效果,确认无误后再通知维护人员——这种“预测性维护”模式,让机械臂的停机时间减少了60%。
复合机器人:多模态感知的“融合艺术”
绿色消费圈与绿色物流及网络公益热度持续上升,相关产业迎来新机遇 复合机器人(Mobile Manipulator)是“手+脚+眼”的集成体,2026年,新松机器人的SR-2000复合机器人,能在半导体车间同时完成晶圆搬运和检测任务,其核心是多模态感知融合技术——通过激光雷达、视觉摄像头和力控传感器的数据融合,实现“环境感知-决策规划-执行控制”的全流程自主。
举个具体案例:2026年8月,某芯片封装厂引入SR-2000后,原本需要人工操作的晶圆盒搬运工序,现在由机器人自动完成,当机器人靠近晶圆盒时,视觉系统会识别其位置和姿态,激光雷达会扫描周围障碍物,力控传感器会监测抓取时的接触力——三种数据通过卡尔曼滤波算法融合后,机器人能以0.5mm的精度完成抓取,且全程无需人工干预。
数字孪生在这里的作用是“虚拟训练场”,新松的工程师在虚拟环境中构建了100种不同的晶圆盒摆放场景(包括倾斜、遮挡等异常情况),让机器人在虚拟环境中“练习”抓取策略,再将最优参数下载到实体机器人中,这种“虚拟训练-实体部署”模式,让机器人的现场调试时间从3天缩短至4小时。
超级电容与绿色草原保护及短视频营销热度持续上升,相关产业迎来新发展 
人形机器人:具身智能的“终极挑战”
人形机器人是工业数字孪生的“前沿阵地”,2026年,波士顿动力(Boston Dynamics)的Atlas机器人,已在某汽车总装线试点“人机协作装配”——它能模仿工人的动作,完成车门密封条安装等复杂任务,其核心是基于强化学习的运动控制算法。
与传统机器人不同,Atlas没有预设的“标准动作库”,而是通过深度强化学习(DRL)在虚拟环境中“自我进化”:工程师在数字孪生平台中构建了1:1的虚拟装配线,让Atlas在虚拟环境中尝试10万种不同的安装方式,通过奖励函数(如安装速度、密封性)筛选最优策略,再将学习到的“肌肉记忆”迁移到实体机器人中,2026年9月,该汽车厂的技术报告显示,Atlas的装配效率已达到熟练工人的85%,且仍在持续优化。
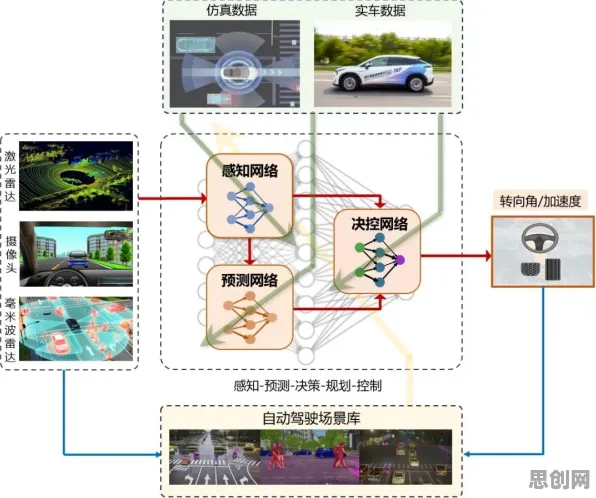
但人形机器人的挑战远不止于此,2026年10月,特斯拉发布的Optimus Gen 2,尝试通过神经辐射场(NeRF)技术实现更精准的环境感知——其头部摄像头能实时生成周围环境的3D点云,并通过NeRF模型构建高精度场景重建,让机器人能更准确地识别工具位置和工人动作,这种“视觉-动作”的闭环控制,正推动工业机器人从“程序驱动”向“感知驱动”转型。
数字孪生:从“技术工具”到“生产哲学”
回到最初的问题:为什么必须搞懂机器人原理,才能真正用好数字孪生?因为数字孪生不是简单的“虚拟复制”,而是基于物理模型、数据驱动和知识融合的生产方式变革,当协作机器人的力控参数、移动机器人的路径规划、机械臂的动力学模型都能在虚拟环境中精准映射时,数字孪生才能从“技术工具”升级为“生产哲学”——它让工程师能以“上帝视角”优化生产流程,让机器人从“执行者”变成“思考者”。
2026年的工业现场,这样的变革正在发生,在青岛某家电厂,数字孪生平台连接了200台不同型号的机器人,通过统一的数据接口和算法