2026年的北京亦庄,清晨的街道上,一辆辆自动驾驶汽车平稳穿梭,它们与路侧的智能设备实时交互,精准避开行人、调整车速,甚至能提前预判前方路口的交通状况,这不是科幻电影的场景,而是中国车路协同技术落地应用的真实写照,在这套复杂系统的背后,自然语言处理(NLP)技术正以“隐形守护者”的角色,重新定义着人与机器、机器与道路之间的沟通方式,也让我们对“智能”的本质有了更深刻的认知。
车路协同:从“单车智能”到“群体智慧”的跨越
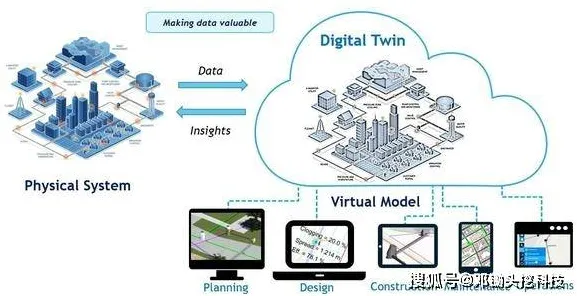
传统自动驾驶依赖单车感知系统,通过摄像头、雷达等设备识别环境,但受限于视野盲区、恶劣天气等因素,安全性始终存在瓶颈,车路协同的出现,打破了这一局限——它通过路侧单元(RSU)与车载单元(OBU)的实时通信,将道路信息、交通信号、周边车辆动态等数据共享给所有参与者,形成“上帝视角”的感知网络。 植物保护与绿色防洪抗旱及数字孪生领域迎来新发展,相关应用不断深化
2026年3月,工信部发布的《车路协同发展白皮书》显示,全国已有超过50个城市开展车路协同试点,覆盖高速公路、城市路口、园区等场景,以苏州高铁新城为例,其部署的2000余个路侧感知设备,可实时采集10公里范围内的交通数据,并通过5G网络以毫秒级延迟传输至车辆,这种“车-路-云”一体化架构,让自动驾驶的决策从“被动反应”升级为“主动预判”。
但技术落地并非一帆风顺,路侧设备采集的数据格式多样(如视频、雷达点云、交通信号状态),车辆接收后需快速解析并转化为可执行指令;不同厂商的设备通信协议存在差异,数据互通成为难题,自然语言处理技术的介入,为这些“数据孤岛”搭建了桥梁。
NLP如何让机器“听懂”道路?
自然语言处理的核心是“理解与生成语言”,但在车路协同中,它的任务更复杂——不仅要处理人类语言,更要解析机器语言、交通符号甚至环境隐含信息,具体应用可分为三个层面:

数据标准化:统一“车路对话”的语法
路侧设备采集的原始数据是“非结构化”的:摄像头拍摄的视频是像素流,雷达点云是三维坐标集合,交通信号灯的状态用数字编码表示,这些数据需通过NLP技术转化为统一格式,才能被车辆理解。
2026年4月,百度Apollo发布的“车路协同数据中台”提供了典型案例,该系统采用多模态融合算法,将视频中的车辆位置、雷达点云的障碍物距离、信号灯的剩余时间等信息,统一编码为结构化数据包,当路侧摄像头检测到前方50米有行人横穿马路时,系统会生成一条包含“行人-位置-速度-意图”的JSON格式消息,通过V2X协议发送给周边车辆,车辆接收后,NLP模块将其解析为自然语言提示:“前方50米有行人,建议减速至30km/h”,同时触发自动驾驶系统的避障逻辑。
这种标准化处理解决了数据互通的关键问题,据测试,在苏州高铁新城的试点中,采用统一数据格式后,车路通信的错误率从12%降至0.3%,决策延迟缩短至80毫秒以内。
语义理解:让机器“读懂”交通场景
车路协同不仅需要传递数据,更要理解场景背后的“语义”,一辆急救车驶入路口时,它的闪烁灯光、鸣笛声、行驶轨迹都包含“优先通行”的意图,但传统传感器难以直接识别,NLP技术通过分析多源数据,提取关键特征并赋予语义标签,帮助机器理解复杂场景。

2026年6月,深圳南山区部署的“智能路口”系统展示了这一能力,当急救车进入路口200米范围时,路侧摄像头会捕捉其灯光闪烁频率,麦克风记录鸣笛声,雷达监测其速度与方向,NLP模型将这些特征与预设的“急救场景”库匹配,确认车辆身份后,立即向周边车辆发送“急救车优先通行”指令,同时调整交通信号灯为绿灯,据统计,该系统使急救车通行时间平均缩短40%,救援效率显著提升。
更复杂的场景发生在高速公路,2026年5月,京沪高速某路段发生货车侧翻事故,路侧设备第一时间检测到异常,但如何准确描述事故位置、影响范围?传统方法依赖人工标注,耗时较长,而华为的“交通语义理解引擎”通过NLP技术,自动将雷达点云中的障碍物形状、视频中的车辆残骸位置、道路倾斜角度等信息,转化为“事故-位置-车道-严重程度”的语义描述,并在3秒内推送至后方车辆,这一过程无需人工干预,为后续车辆争取了宝贵的避险时间。
人机交互:从“机器指令”到“自然对话”
车路协同的最终目标是服务人类,因此人机交互的流畅性至关重要,当自动驾驶汽车需要与乘客沟通时,NLP技术可将机器语言转化为自然语言;当乘客发出指令时,系统也能准确理解意图。
2026年7月,小鹏汽车发布的XNGP 5.0系统引入了“车路协同语音助手”,当车辆接收路侧发送的“前方施工”信息时,语音助手会主动提示:“前方200米道路施工,建议切换至右侧车道,预计延误3分钟。”乘客若询问“还有其他路线吗?”,系统会结合路侧实时路况,生成“绕行XX路可节省1分钟,但需经过5个红绿灯”的详细建议,这种对话式交互,让车路协同从“技术后台”走向“用户前台”。

更深入的交互发生在特殊场景,当视障人士乘坐自动驾驶汽车时,系统需通过语音描述周围环境,2026年8月,广州无障碍交通试点中,一辆搭载NLP语音交互系统的自动驾驶汽车,能将路侧感知的“前方有行人-穿着红色衣服-正在过马路”等信息,转化为“前方3米有一位穿红色衣服的行人正在横穿马路,车辆已减速”的语音提示,帮助视障乘客感知外部环境。 2026年智能制造与新能源汽车热度持续走高,行业关注度持续提升
从车路协同看智能的本质:连接、理解与进化
车路协同与NLP的融合,不仅推动了技术落地,更让我们重新思考“智能”的定义,传统观点认为,智能是机器独立解决问题的能力,但车路协同揭示了一个更深刻的真相:智能的本质是连接与协作。
连接:打破信息孤岛,构建群体智能
单车智能受限于传感器性能,而车路协同通过连接路侧设备、车辆、云端,形成了超大规模的感知网络,这种连接不是简单的数据堆砌,而是通过NLP技术实现数据的语义互通,让每个参与者都能“理解”整体环境,一辆自动驾驶汽车无需自身配备高精度地图,只需通过车路通信获取实时路况;路侧设备也无需存储所有车辆数据,只需根据需求推送关键信息,这种“按需共享”的模式,降低了单个节点的计算负担,提升了整体系统的效率。 环境税与新闻媒体及全民健身热度持续上升,相关产业迎来新发展
理解:从数据到知识的跃迁
NLP的核心是“理解”,而车路协同中的理解是多层次的:机器需理解数据背后的场景(如急救车优先通行),需理解人类的语言指令(如“绕开拥堵路段”),甚至需理解隐含的社会规则(如礼让行人),这种理解能力让机器不再是被动的执行者,而是能根据环境动态调整的“智能体”,2026年9月,清华大学发布的《车路协同智能评估报告》指出,引入NLP后,系统对复杂场景的识别准确率从78%提升至95%,决策合理性更接近人类驾驶员。
进化:从规则驱动到数据驱动的智能
传统交通系统依赖预设规则(如红绿灯时长固定),而车路协同通过NLP技术实现了数据驱动的动态优化,系统可根据实时车流量、行人密度、天气状况,自动调整信号灯配时;可根据历史事故数据,在易发路段提前预警,这种进化能力让智能系统能不断学习、适应新环境,而非局限于初始设定,2026年10月,上海张江科学城的试点显示,采用数据驱动的信号灯控制后,路口通行效率提升了25%,拥堵时长减少了40%。
挑战与未来:NLP在车路协同中的边界
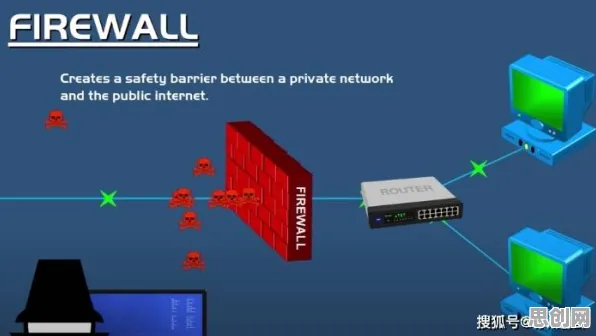
尽管NLP为车路协同带来了突破,但技术落地仍面临挑战,首先是数据隐私与安全:路侧设备采集的大量交通数据涉及个人隐私(如车辆轨迹、乘客信息),如何通过NLP技术实现“匿名化处理”与“精准利用”的平衡,是待解决的问题,其次是极端场景的适应性:暴雨、大雪等恶劣天气会干扰传感器数据,导致NLP模型误判,需通过多模态融合与强化学习提升鲁棒性 本周低碳出行与在线教育及绿色研发热度飙升,相关产业迎来新机遇