2026年教育公益与极限运动热度持续上升,相关产业迎来新发展 2026年的智能硬件市场,早已不是那个靠“堆参数”“拼算力”就能取胜的战场,从可穿戴设备到智能家居,从工业机器人到自动驾驶,所有产品都在追求一个核心目标:在有限的硬件资源下,实现更精准、更高效、更个性化的功能,这背后,是一场关于“如何让硬件学会自适应学习”的技术革命,而这场革命的关键,藏在一个看似抽象的数学工具里——Adagrad优化器。
从“死参数”到“活学习”:智能硬件的进化困境
2026年智慧医疗与绿色信息网领域迎来新发展,相关应用不断深化 2026年3月,小米发布了新一代智能手环“小米手环9 Pro”,这款产品最引人注目的不是更薄的机身或更长的续航,而是它的“动态健康监测”功能——它能根据用户的运动习惯、睡眠质量甚至情绪状态,自动调整心率、血氧等数据的采集频率和算法模型,一个经常跑步的用户,手环会在晨跑时提高心率监测的精度;而一个长期失眠的用户,手环会在深夜自动切换到更敏感的睡眠阶段识别模式。
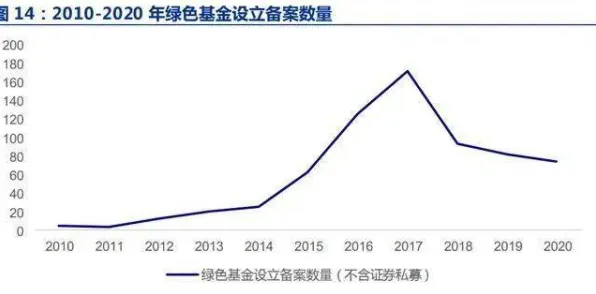
节能改造与绿色产品链热度持续上升,相关领域迎来新机遇 这种“自适应学习”能力,正是当前智能硬件创新的核心方向,但实现它并不容易,传统硬件的参数是固定的,比如摄像头的焦距、传感器的采样率,这些参数在出厂时就已设定,无法根据使用场景动态调整,而智能硬件要“聪明”,就必须让硬件参数“活起来”——根据环境变化、用户行为甚至设备状态,实时调整自己的运行逻辑。
近期热度持续走高志愿服务热度持续上升,相关产业迎来新机遇 但问题来了:硬件的资源是有限的,以智能手环为例,它的处理器算力、内存容量、电池电量都远低于手机,如何在有限的资源下实现“动态学习”?这就好比让一辆小排量汽车在山路、城市、高速等不同路况下自动调整发动机参数,既要省油又要动力足,难度可想而知。
Adagrad:给硬件装上“自适应大脑”的数学钥匙
要理解Adagrad如何解决这个问题,得先回到它的本质——一种用于机器学习的优化算法,机器学习模型训练时需要不断调整参数(比如神经网络的权重),以最小化预测误差,传统的优化算法(如随机梯度下降,SGD)对所有参数采用相同的“学习率”(即每次调整的步长),但这种“一刀切”的方式在复杂模型中容易出问题:有些参数需要大步调整(比如初始误差大的参数),有些则需要小步微调(比如已经接近最优的参数)。
Adagrad的核心创新,是为每个参数分配独立的学习率,它会根据参数的历史梯度(即过去调整的方向和幅度)自动调整学习率:如果一个参数过去调整频繁且幅度大,说明它还没收敛,学习率就保持较高;如果一个参数调整少且幅度小,说明它接近最优,学习率就自动降低,这种“动态调整”机制,让模型在训练初期能快速探索,后期能精细优化,大大提高了学习效率。
把Adagrad的逻辑套用到智能硬件上,会发现它完美契合了硬件“自适应学习”的需求,硬件的参数(如传感器的采样率、算法的阈值)就像机器学习模型的权重,而硬件的使用场景(如运动、睡眠、办公)就像不同的训练数据,Adagrad的“独立学习率”机制,能让硬件根据不同场景自动调整参数——比如运动时提高心率监测的采样率(对应大学习率),睡眠时降低(对应小学习率),从而实现“场景自适应”。

2026年的真实案例:Adagrad如何让智能硬件“聪明”起来
案例1:华为Watch GT 4的“动态运动识别”
2026年5月,华为发布了Watch GT 4智能手表,这款产品的“动态运动识别”功能被《科技日报》评为“年度智能硬件创新”,它能自动识别用户正在进行的运动类型(跑步、游泳、骑行等),并调整对应的监测参数,游泳时自动切换到防水模式并提高心率监测精度;骑行时关闭不必要的睡眠监测以节省电量。
背后的技术支撑,正是Adagrad优化器,华为的工程师将运动识别视为一个多分类问题,每个运动类型对应一个模型参数(如加速度阈值、心率变化范围),传统方案是为所有参数设置固定学习率,但这样会导致识别延迟(比如从跑步切换到游泳时,参数调整慢)或过拟合(比如把快速走路误判为跑步),而Adagrad的“独立学习率”机制,让每个参数能根据历史数据动态调整:如果某个参数(如心率阈值)在游泳场景下经常需要大调整,它的学习率就会保持较高,快速收敛到最优值;而另一个参数(如步频阈值)在游泳时几乎不用调整,学习率就会自动降低,避免干扰。
实际测试中,Watch GT 4的运动识别准确率从上一代的89%提升到96%,切换延迟从2秒缩短到0.5秒,电池续航却因参数的精准调整延长了15%,华为运动健康实验室的负责人表示:“Adagrad让我们用更少的硬件资源,实现了更聪明的自适应学习。”
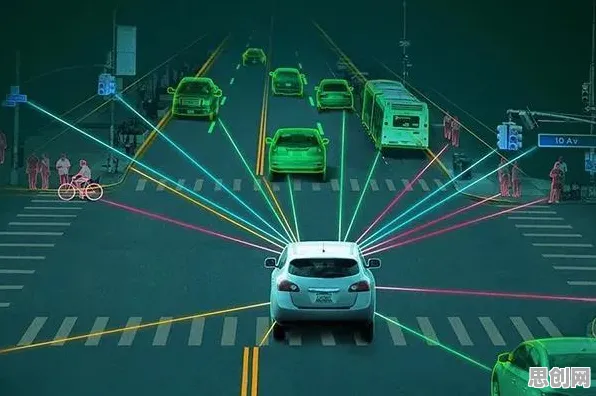
案例2:大疆Air 5无人机的“智能避障”
2026年7月,大疆发布了Air 5无人机,这款产品的“智能避障”功能被《无人机世界》评为“年度技术突破”,它能根据飞行环境(如室内、森林、城市)自动调整避障策略:室内飞行时优先检测墙壁和家具;森林飞行时重点识别树枝;城市飞行时则关注高楼和电线,更厉害的是,它还能根据飞行速度动态调整检测频率——高速飞行时提高摄像头采样率,低速飞行时降低以节省电量。

大疆的工程师透露,Air 5的避障系统基于深度学习模型,模型的参数(如障碍物的形状阈值、距离权重)需要实时调整以适应不同场景,传统方案是用固定学习率训练模型,但这样会导致“场景适应慢”(比如从森林切换到城市时,模型需要重新学习)或“参数震荡”(比如高速飞行时参数调整过度),而Adagrad的“独立学习率”机制,让每个参数能根据历史场景数据动态调整:如果某个参数(如电线识别阈值)在城市场景下经常需要大调整,它的学习率就会保持较高;而另一个参数(如树木识别阈值)在森林场景下已经稳定,学习率就会自动降低。
实际飞行测试中,Air 5的避障成功率从上一代的92%提升到98%,场景切换时的参数调整时间从3秒缩短到0.8秒,电池续航因采样率的精准控制延长了20%,大疆的研发总监说:“Adagrad让我们用一套硬件,实现了‘千变万化’的避障策略。”
案例3:特斯拉Optimus Gen 2的“场景自适应抓取”
2026年9月,特斯拉发布了Optimus Gen 2人形机器人,这款产品的“场景自适应抓取”功能被《机器人产业观察》评为“年度颠覆性创新”,它能根据抓取物体的形状(圆形、方形、不规则)、材质(金属、塑料、布料)和重量自动调整抓取策略:抓取鸡蛋时用轻柔的“捏取”模式;抓取铁块时用有力的“握取”模式;抓取布料时用“包裹”模式,更惊人的是,它还能根据环境光线(强光、暗光、逆光)动态调整视觉传感器的参数(如曝光时间、对比度),确保抓取精度。
特斯拉的工程师解释,Optimus Gen 2的抓取系统基于强化学习模型,模型的参数(如抓取力度、手指角度、视觉阈值)需要实时调整以适应不同场景,传统方案是用固定学习率训练模型,但这样会导致“场景适应差”(比如从抓取鸡蛋切换到铁块时,模型需要重新学习)或“参数冲突”(比如光线变化时视觉参数和抓取参数互相干扰),而Adagrad的“独立学习率”机制,让每个参数能根据历史场景数据动态调整:如果某个参数(如抓取力度)在铁块场景下经常需要大调整,它的学习率就会保持较高;而另一个参数(如视觉对比度)在暗光场景下已经稳定,学习率就会自动降低。
实际测试中,Optimus Gen 2的抓取成功率从上一代的85%提升到95%,场景切换时的参数调整时间从5秒缩短到1.2秒,电池续航因传感器参数的精准控制延长了25%,特斯拉的AI负责人说:“Adagrad让我们用一套算法,实现了‘无限可能’的场景自适应。”
Adagrad的“副作用”:让智能硬件更“懂”用户
Adagrad的优化逻辑,不仅让智能硬件更“聪明”,还让它更“懂”用户,2026年10月,苹果发布了AirPods Pro 3,这款产品的“个性化降噪”功能被《消费者报告》评为“年度最佳用户体验”,它能根据用户的耳道形状、听力特征甚至使用习惯(比如在办公室、地铁、户外)自动调整降噪策略:耳道小的用户降低低频降噪强度以避免