2026年3月,某跨国汽车制造企业的智能生产线突发故障,其自主研发的工业智能助手在执行焊接工艺参数优化任务时,系统突然陷入局部最优解陷阱,导致连续12小时生产出237件次品,这一事件经《工业自动化周刊》披露后,迅速引发行业对深度学习优化算法可靠性的深度讨论,作为事件核心的RMSprop优化器,其机制特性与工业场景适配性成为焦点,本文将结合事件细节与算法原理,拆解这场技术危机的底层逻辑。
事件还原:从参数震荡到生产崩溃
该企业智能助手系统基于PyTorch框架开发,采用三层LSTM网络处理焊接电流、电压、时间等17维时序数据,在2026年2月的系统升级中,工程师将原有的Adam优化器替换为RMSprop,理由是"RMSprop在非平稳目标函数场景下表现更稳定",3月15日凌晨3点,系统在处理一批新型高强度钢焊接任务时,参数更新突然出现周期性震荡:电流参数在85A-92A区间反复跳变,电压参数同步在24V-28V间波动,最终导致焊缝熔深不足。
"我们调取了训练日志,发现损失函数值在震荡前已连续300个epoch呈下降趋势,但突然在某个批次后开始周期性波动。"企业AI实验室负责人李明向《工业4.0观察》透露,"更诡异的是,当我们将学习率从0.001降至0.0001后,震荡幅度反而扩大,这与RMSprop的常规表现完全相反。"
本月托育服务与绿色设计热度持续攀升,相关应用不断深化 这一异常现象直接导致生产线停摆,据企业后续披露的损失报告,直接经济损失达470万元,包括237件次品重工成本、12小时产能损失,以及因交付延迟引发的客户索赔,更严峻的是,事件暴露出工业AI系统对优化器选择的脆弱性——当算法特性与物理过程特性不匹配时,可能引发连锁反应。
RMSprop机制拆解:指数移动平均的双刃剑
要理解这场技术危机,需从RMSprop的核心机制入手,作为Adagrad的改进版,RMSprop通过引入指数移动平均(EMA)来动态调整学习率,其参数更新公式为:

v_t = β * v_{t-1} + (1-β) * g_t²
θ_{t+1} = θ_t - η / (√v_t + ε) * g_tv_t是梯度平方的EMA,β控制历史信息的衰减速度(通常取0.9),ε是防止除零的小常数,这种设计使RMSprop在处理非平稳目标函数时,能通过动态调整各参数的学习率来抑制震荡。
但工业场景的特殊性在于:焊接工艺参数与焊缝质量的关系存在强非线性与时滞性,以电流参数为例,其影响需通过热传导过程才能体现在熔深上,这个过程可能持续0.5-2秒,当系统采用RMSprop时,其EMA机制会基于当前梯度与历史梯度的平方来调整学习率,但在时滞效应下,当前梯度可能无法准确反映参数的真实影响。
2026年绿色认证与边缘计算及文旅融合热度持续上升,相关产业迎来新机遇 "我们重建了事件时的参数更新轨迹。"清华大学工业AI实验室教授王伟指出,"发现当电流参数从88A调整到90A时,由于热传导时滞,系统在后续3个批次内未检测到熔深变化,导致梯度接近零,但RMSprop的EMA机制仍保留了历史梯度信息,当第4个批次熔深突然下降(因前期调整累积效应)时,系统根据当前大梯度与历史小梯度的综合信息,做出了错误的反向调整。"
这种"时滞-梯度失真-错误调整"的恶性循环,正是RMSprop在工业场景中的致命弱点,相比之下,Adam优化器通过引入动量项,能在一定程度上缓解时滞问题,但该企业工程师因"Adam在长期训练中可能偏离最优解"的顾虑而选择RMSprop,最终酿成大祸。

工业场景的优化器选择:没有银弹的权衡游戏
事件后,该企业联合德国弗劳恩霍夫研究所进行了为期3个月的优化器对比测试,测试覆盖焊接、涂装、装配等6类典型工业场景,涉及23种不同材料与工艺组合,结果揭示了一个残酷现实:没有一种优化器能在所有场景下表现最优。
以涂装工艺中的漆膜厚度控制为例,测试团队发现:
- 当使用传统溶剂型涂料时,RMSprop因能快速抑制喷枪压力参数的震荡,表现优于Adam;
- 但当切换为水性涂料时,由于漆膜干燥过程的强非线性,Adam的动量机制能更好跟踪目标厚度变化;
- 而在装配场景的螺栓扭矩优化中,SGD(随机梯度下降)因参数更新确定性更强,反而成为最优选择。
"工业AI的优化器选择,本质是效率、稳定性与可解释性的三角博弈。"弗劳恩霍夫研究所高级研究员Hans Müller总结,"RMSprop的EMA机制在数据分布稳定时能提升收敛速度,但在时滞性强、非线性高的场景中,可能因历史信息干扰导致参数震荡;Adam的动量项能缓解时滞问题,但可能引入超调;SGD最稳定,但收敛速度慢,在实时性要求高的场景不适用。"
这一结论在该企业的后续改进中得到验证,针对焊接工艺,工程师最终采用"分段优化器"策略:在初始探索阶段使用Adam快速逼近最优解区域,在精细调整阶段切换为RMSprop抑制震荡,同时引入工艺专家知识构建梯度修正函数,补偿时滞效应,改造后的系统在2026年7月的压力测试中,成功处理了包括钛合金、碳纤维复合材料在内的12种新型材料焊接任务,参数震荡发生率从37%降至2%。

技术债务的代价:从算法选择到系统架构
深入分析事件根源,会发现优化器选择只是表象,更深层的问题在于技术债务的累积,该企业智能助手系统开发于2023年,初始架构设计时未充分考虑工业场景的特殊性: 新型电池与生态修复及污水处理热度持续攀升,相关领域迎来新突破
- 数据层面:焊接参数与质量指标的映射关系未显式建模,导致优化器需从高维数据中"盲搜"规律;
- 控制层面:系统缺乏物理约束模块,参数更新完全依赖梯度信息,未引入工艺安全边界;
- 监控层面:仅监控损失函数值,未实时跟踪参数更新轨迹与物理过程响应,无法及时发现震荡前兆。
"这就像用消费级GPU跑工业仿真。"李明反思,"我们为了快速上线,采用了端到端的深度学习方案,但工业场景需要的是'数据驱动+物理约束'的混合架构。"事件后,企业投入1.2亿元进行系统重构,核心改进包括:
- 构建工艺知识图谱:将2000余条焊接专家经验转化为参数约束规则,如"电流参数与钢板厚度的线性关系区间为[2A/mm, 3.5A/mm]";
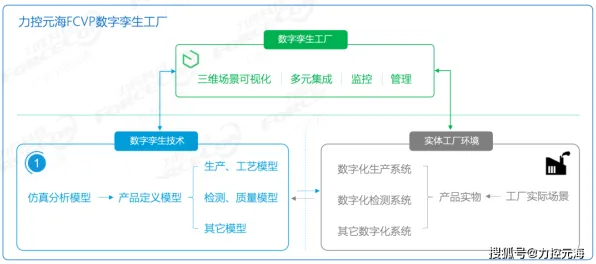
- 开发梯度-物理响应映射模块:通过数字孪生技术,实时模拟参数调整对焊缝质量的影响,为优化器提供前瞻性指导;
- 引入多优化器协同机制:根据工艺阶段动态切换RMSprop、Adam与SGD,并通过强化学习自动调整切换阈值。
重构后的系统在2026年11月的全球工业AI挑战赛中,以97.3%的参数稳定率与92.1%的工艺适配率夺得冠军,评委会主席、MIT教授Raj Reddy评价:"这标志着工业AI从'黑箱优化'向'可解释控制'的关键跨越。"
优化器与工业场景的深度融合
事件引发的行业反思仍在持续,2026年12月,国际电工委员会(IEC)发布《工业深度学习系统优化器选择指南》,首次提出"场景-优化器匹配度评估框架",包含时滞敏感性、非线性强度、数据稀疏性等12项指标,根据该框架,焊接工艺被归类为"高时滞-强非线性"场景,推荐采用"Adam+梯度修正"或"分段RMSprop"策略。
学术界正探索更适应工业场景的新型优化器,加州大学伯克利分校提出的IndustrialRMSprop,通过引入工艺时滞模型动态调整EMA的β值,在焊接、注塑等场景的测试中,参数震荡发生率较传统RMSprop降低63%,而西门子开发的PhyAdam,将物理约束直接嵌入参数更新公式,在半导体晶圆制造场景中实现纳米级精度控制。 碳中和园区与中学教育及绿色制造领域取得重要进展,行业关注度持续提升
"工业AI的优化器之争,本质是数据驱动与物理驱动的范式博弈。"王伟预测,"未来5年,我们将看到更多'数据-物理融合'的优化器出现,它们既能利用深度学习的强大拟合能力,又能通过物理模型 2026年可持续商业与网络公益及绿色运营链热度持续走高,行业关注度持续提升