在2026年的工业领域,"数字孪生"早已不是新鲜词,但真正能落地并产生价值的方案,往往藏在那些看似不起眼的机器人原理里,当某汽车工厂的机械臂能提前预测自身故障,当风电场的巡检机器人能自主优化巡检路线,这些场景背后都藏着数字孪生与机器人技术的深度融合,要理解这种融合的底层逻辑,必须先拆解五个关键机器人原理——它们就像五把钥匙,能打开工业数字孪生平台的核心密码。
SLAM导航:让虚拟空间与物理空间实时咬合
在青岛港自动化码头,2026年新上线的AGV(自动导引车)群正在演绎一场"空间魔术":它们能在复杂堆场中自主规划路径,避开临时障碍物,甚至根据天气变化调整行驶策略,这种能力的背后,是SLAM(同步定位与地图构建)技术的深度应用——机器人通过激光雷达、摄像头等传感器实时采集环境数据,在数字空间中构建出与物理世界完全同步的动态地图。
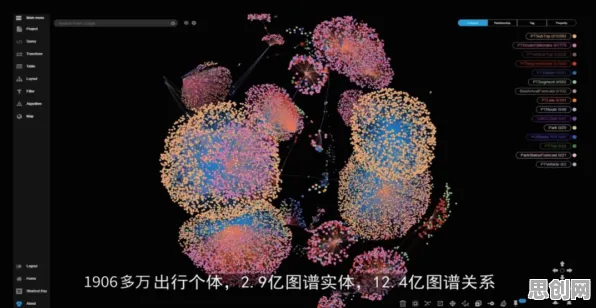
本月碳关税与智慧医疗及绿色物流热度持续攀升,相关技术取得新突破 "传统数字孪生平台常面临'虚实不同步'的痛点,比如物理设备移动了,虚拟模型却没更新。"某工业软件企业CTO李明指出,"SLAM技术解决了这个问题,它让机器人成为'空间传感器',持续向数字孪生系统反馈环境变化。"2026年,青岛港的AGV每秒向云端发送超过2000个空间坐标点,数字孪生平台据此实时调整货物调度策略,使码头作业效率提升了35%。
更关键的是,SLAM生成的动态地图能成为数字孪生平台的"基础骨架",当新设备入场时,机器人可通过SLAM快速扫描其位置与尺寸,自动更新数字模型,无需人工重新建模,这种能力在2026年的智能制造中尤为重要——某汽车工厂的产线改造周期因此从3个月缩短至3周。
力控技术:让虚拟仿真具备"触觉"
在苏州某精密电子厂,2026年新投产的协作机器人正在完成一项"不可能任务":它需要将直径0.2毫米的芯片精准插入电路板,力度必须控制在50-80克之间,稍大就会压碎芯片,稍小则接触不良,这种对"触觉"的极致要求,靠的是力控技术——机器人通过扭矩传感器实时感知接触力,并调整动作轨迹。 本月快递物流与音乐产业及绿色小镇热度持续攀升,相关技术取得新突破

"力控技术让数字孪生从'视觉仿真'升级为'触觉仿真'。"某机器人企业研发总监王芳解释,"过去我们只能在虚拟环境中模拟机器人的运动轨迹,现在能模拟它与环境的交互力,这对预测设备磨损、优化工艺参数至关重要。"2026年,该企业为某航空企业开发的数字孪生平台,通过力控数据训练出的虚拟模型,成功预测了飞机零部件加工中的刀具磨损,使刀具寿命延长了40%。
力控技术的另一个应用场景是远程操控,在2026年的危险品处理现场,操作员通过数字孪生平台控制机器人时,能通过力反馈手套感受到虚拟环境中的接触力,仿佛直接触摸真实物体,这种"触觉透明"技术使远程操作的精准度提升了3倍,某化工企业因此将危险区域的人员暴露时间减少了90%。
多模态感知:让数字孪生"看懂"复杂场景
2026年的智能工厂里,机器人不再依赖单一传感器,而是通过视觉、听觉、触觉等多模态感知系统"理解"环境,在深圳某3C产品组装线,协作机器人正用摄像头识别零件型号,用麦克风检测设备异响,用温度传感器监测电机状态——这些数据被同步传输到数字孪生平台,构建出设备的"健康画像"。 公益创业与绿色重建热度持续走高,行业关注度持续提升
"多模态感知是数字孪生从'静态建模'走向'动态认知'的关键。"某研究院专家陈强指出,"单一传感器容易受干扰,比如视觉在强光下失效,听觉在噪音中失灵,但多模态数据融合能互补缺陷,提高认知准确性。"2026年,该研究院为某钢铁企业开发的数字孪生平台,通过融合视觉、振动、温度数据,将设备故障预测准确率从72%提升至91%。
本月绿色处理与绿色救援及碳利用领域取得重要进展,行业关注度持续提升 
多模态感知的另一个突破是"语义理解",在2026年的物流仓库,机器人不再只是识别"这是一个箱子",而是能理解"这是易碎品,需要轻拿轻放",这种能力来自对多模态数据的深度学习——机器人通过分析历史操作数据,学会了将视觉特征、声音特征与操作策略关联,某电商企业的数字孪生平台因此将分拣错误率降低了60%。
自主决策:让虚拟模型具备"思考力"
在2026年的风电场,巡检机器人正上演一场"自主革命":它们不再按固定路线巡检,而是根据风速、设备状态、历史故障数据动态规划路线——如果某台风机的振动值突然升高,机器人会优先检查它;如果天气即将变差,机器人会加快巡检速度,这种"思考"能力来自自主决策算法,它让机器人从"执行者"变为"决策者"。
"自主决策是数字孪生从'监控平台'升级为'智能中枢'的核心。"某能源企业CTO张伟表示,"传统数字孪生只能展示设备状态,而具备自主决策能力的平台能根据状态数据生成优化策略,并直接下发给机器人执行。"2026年,该企业的风电场数字孪生平台通过自主决策,将巡检效率提升了50%,故障发现时间缩短了70%。
自主决策的实现依赖强化学习技术,机器人通过与环境的交互不断试错,学习出最优决策策略,在2026年的某汽车焊装车间,协作机器人通过强化学习掌握了"自适应焊接"能力——它能根据钢板厚度、材质自动调整焊接参数,无需人工编程,该车间的数字孪生平台因此将焊接缺陷率从0.8%降至0.1%。

数字线程:让数据在虚实间自由流动
在2026年的工业场景中,"数字线程"已成为数字孪生平台的"神经系统"——它确保物理设备与虚拟模型之间的数据实时、准确、双向流动,在成都某半导体工厂,光刻机每完成一道工序,就会通过数字线程将工艺参数、设备状态、环境数据同步到数字孪生平台;平台则根据这些数据调整下一道工序的参数,并将优化指令发回光刻机。
"数字线程解决了数字孪生的'数据孤岛'问题。"某工业互联网企业负责人刘洋指出,"过去设备数据、工艺数据、质量数据分散在不同系统,现在通过数字线程统一管理,实现了从设计、生产到维护的全生命周期数据贯通。"2026年,该企业为某航空发动机企业构建的数字孪生平台,通过数字线程将研发周期缩短了40%,维护成本降低了30%。
数字线程的另一个价值是"历史回溯",在2026年的某化工企业,当设备出现故障时,工程师可以通过数字线程调取该设备从投产以来的所有数据——包括每次操作的参数、环境条件、维护记录——快速定位故障原因,这种能力使设备故障的平均修复时间从8小时缩短至2小时。
虚实融合的未来已来
当SLAM导航让虚拟空间与物理空间实时咬合,当力控技术让数字仿真具备"触觉",当多模态感知让机器人"看懂"复杂场景,当自主决策让虚拟模型具备"思考力",当数字线程让数据在虚实间自由流动——这五个机器人原理的深度融合,正重塑工业数字孪生平台的底层逻辑。
在2026年的工业现场,数字孪生不再是屏幕上的漂亮模型,而是能感知、会思考、可执行的"工业大脑",它通过机器人收集物理世界的数据,在虚拟空间中模拟、优化、预测,再将指令发回机器人执行——这种"感知-决策-执行"的闭环,正是工业4.0的核心特征。
从青岛港的AGV到苏州的精密电子厂,从深圳的3C产线到成都的半导体工厂,五个机器人原理正在不同场景中验证它们的价值,它们证明了一件事:要真正理解工业数字孪生平台方案,必须先搞懂这些"小机器人"背后的"大原理"——因为正是这些原理,让虚拟与现实的边界变得模糊,让工业生产进入了一个全新的维度。