在2026年的工业领域,计算机视觉与数字孪生技术的融合正掀起一场前所未有的变革,从德国的智能工厂到中国的长三角制造业集群,全球顶尖企业都在探索如何通过数字孪生平台实现生产流程的精准模拟与优化,而在这场技术浪潮中,一个隐藏的规律逐渐浮现:计算机视觉的部署质量直接决定了数字孪生平台的“生命体征”——数据精度、响应速度和决策可靠性,本文将通过三个真实案例,揭开这一规律背后的技术逻辑与实践路径。
宝马集团慕尼黑工厂的“视觉-孪生”闭环系统
2026年3月,宝马集团宣布其慕尼黑工厂完成了一项里程碑式的升级:通过部署新一代计算机视觉系统,将数字孪生平台的预测准确率提升至98.7%,这一数据背后,是一个由“感知-建模-反馈”构成的闭环系统。
在总装线上,每辆汽车需要经过200多个装配节点,传统监控方式依赖人工巡检和固定传感器,存在盲区多、响应慢的问题,宝马的解决方案是:在关键工位安装12台高分辨率工业相机,结合NVIDIA Orin芯片的边缘计算能力,实时捕捉装配过程中的微小偏差——比如螺栓扭矩不足0.1牛米、焊缝宽度偏差0.02毫米等,这些视觉数据通过5G网络同步至数字孪生平台,与虚拟模型中的理论参数进行比对,一旦发现偏差超过阈值,系统会在0.3秒内触发警报,并自动调整机械臂参数或通知工人干预。
“过去,我们可能需要2小时才能发现一个装配问题,现在缩短到了3分钟。”宝马数字孪生项目负责人汉斯·穆勒在接受《工业自动化》杂志采访时表示,“但真正的突破在于,视觉系统不仅提供了‘错误信号’,还为孪生模型提供了持续优化的‘训练数据’,通过分析10万次螺栓拧紧动作的视觉数据,我们发现某型号机械臂在特定角度下的扭矩输出存在0.5%的衰减,这一发现直接推动了设备维护周期的调整。”
这一案例揭示了第一个规律:计算机视觉是数字孪生平台的“感官器官”,其数据采集的颗粒度决定了孪生模型的“真实感”,宝马的系统中,视觉数据的分辨率达到0.01毫米级,采样频率高达1000帧/秒,这种“超现实”的感知能力,使得数字孪生模型能够精准复现物理世界的每一个细节。

中芯国际的“视觉-缺陷”预测模型
在半导体制造领域,数字孪生技术的应用面临更严峻的挑战:晶圆加工过程中的缺陷可能只有纳米级,传统视觉检测设备难以捕捉,而一旦缺陷流入下游,将导致整批产品报废,2026年5月,中芯国际公布了一项突破性成果:通过融合多光谱计算机视觉与数字孪生技术,将晶圆缺陷预测准确率从72%提升至89%。
中芯国际的解决方案分为三步:在光刻机、蚀刻机等关键设备内部部署定制化视觉传感器,这些传感器不仅包含可见光摄像头,还集成了红外、紫外、X射线等多光谱成像模块,能够捕捉晶圆表面及内部的微观结构变化;将视觉数据与设备运行参数(如温度、压力、功率)进行时空对齐,构建“设备-工艺-质量”的三维关联模型;在数字孪生平台中模拟不同工艺条件下的缺陷演化路径,提前3-5小时预测潜在风险。
“我们曾发现某批次晶圆在蚀刻环节出现边缘毛刺,传统方法需要停机检查设备,耗时至少2小时。”中芯国际智能制造总监李娜介绍,“通过视觉-孪生系统,我们定位到问题根源是蚀刻腔体的气体分布不均,而这一结论是通过对比10万组历史视觉数据与设备参数得出的,调整气体喷嘴角度后,缺陷率从1.2%降至0.1%,整个过程仅用40分钟。”
这一案例揭示了第二个规律:计算机视觉是数字孪生平台的“数据引擎”,其多模态融合能力决定了模型的“预测力”,中芯国际的系统中,视觉数据不再孤立存在,而是与设备状态、工艺参数、环境条件等数据深度融合,这种“全息感知”使得数字孪生模型能够模拟复杂工艺条件下的因果关系,而非简单的相关性。

三一重工的“视觉-运维”协同网络
对于重型装备制造商而言,数字孪生技术的应用场景不仅限于生产环节,更延伸至产品全生命周期管理,2026年7月,三一重工宣布其全球首套“视觉-运维”数字孪生系统正式投入使用,该系统通过部署在挖掘机、起重机等设备上的视觉传感器,实现了对设备健康状态的实时监测与预测性维护。
2026年燃料电池与新能源发电及能源转型热度持续上升,相关产业迎来新发展 以三一重工的SY365H挖掘机为例,每台设备安装了8个视觉传感器,分别监测发动机舱、液压系统、履带等关键部位的温度、振动、泄漏等异常,这些传感器采用低功耗设计,可连续工作3年以上无需更换电池,数据通过LoRaWAN网络传输至云端数字孪生平台,在平台上,每个设备都有一个对应的虚拟模型,模型中集成了历史维修记录、设计参数、使用工况等数据,当视觉传感器检测到异常时,系统会自动调取相关数据,通过AI算法判断故障类型(如液压泵磨损、发动机过热)并预测剩余寿命。
“去年,我们在内蒙古的一台SY365H挖掘机通过视觉系统检测到液压油泄漏,系统不仅定位了泄漏点,还根据泄漏速度和设备使用强度,预测剩余使用寿命仅剩120小时。”三一重工服务总监王强表示,“我们提前安排了维修人员和配件,避免了设备停机造成的损失,据统计,该系统投入使用后,设备平均无故障时间(MTBF)提升了40%,维修成本降低了25%。”
这一案例揭示了第三个规律:计算机视觉是数字孪生平台的“连接纽带”,其端-边-云协同能力决定了模型的“行动力”,三一重工的系统中,视觉传感器分布在设备端,边缘计算节点进行初步数据处理,云端数字孪生平台完成复杂建模与决策,这种“分布式感知-集中式决策”的架构,使得数字孪生模型能够跨越物理与数字世界的边界,直接指导现实世界的运维行动。

技术背后的深层逻辑
从宝马、中芯国际到三一重工的案例中,我们可以看到一个共同的技术路径:计算机视觉通过“高精度感知-多模态融合-端边云协同”三层架构,为数字孪生平台提供了“真实-智能-可行”的数据基础,这一路径的实现,依赖于三大关键技术的突破:
-
超分辨率视觉传感器:2026年的工业相机已能够实现微米级甚至纳米级的分辨率,同时具备高动态范围(HDR)和抗干扰能力,能够在强光、高温、振动等恶劣环境下稳定工作,巴斯夫与索尼联合研发的工业相机,分辨率达到5000万像素,帧率1000fps,可在-40℃至85℃环境下运行。
-
边缘-云端协同计算:随着NVIDIA Jetson Orin、华为Atlas 900等边缘计算设备的普及,视觉数据的预处理和分析可以在设备端完成,仅将关键特征上传至云端,大大降低了数据传输延迟和存储成本,宝马工厂的边缘计算节点可在0.1秒内完成螺栓拧紧动作的视觉分析,而无需将原始视频数据上传。
-
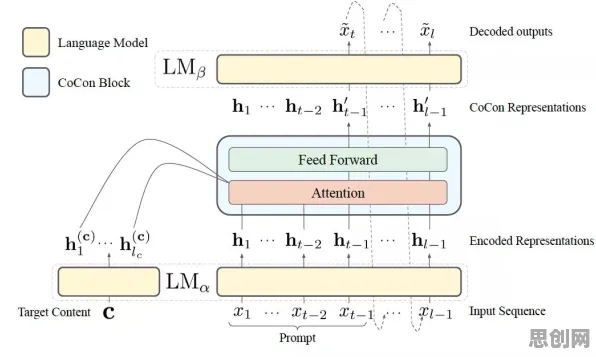
多模态数据融合算法:2026年的AI算法已能够高效融合视觉、力觉、温度、振动等多模态数据,通过图神经网络(GNN)、Transformer等模型提取深层特征,构建更精准的数字孪生模型,中芯国际的缺陷预测模型,通过融合12种不同模态的数据,将特征提取效率提升了3倍。
挑战与未来展望
尽管计算机视觉在数字孪生平台中的应用已取得显著进展,但仍面临两大挑战:一是数据隐私与安全,工业视觉数据往往包含企业的核心工艺信息,如何在保证数据安全的前提下实现共享与协同,是亟待解决的问题;二是模型可解释性,深度学习模型的“黑箱”特性使得工程师难以理解视觉数据与孪生模型之间的因果关系,限制了技术的进一步推广。
展望未来,随着量子计算、光子计算等新型计算技术的成熟,计算机视觉与数字孪生的融合将迈向更高阶段,量子计算可大幅提升多模态数据融合的效率,光子计算可实现超低延迟的视觉感知,这些技术将使得数字孪生平台能够模拟更复杂的工业场景,甚至实现“自学习、自 本月自然保护区热度持续攀升,相关应用不断深化