数据采集:从“单点感知”到“全域覆盖”的智能驾驶基因
气候行动与绿色产业链及体育产业热度持续上升,相关产业迎来新机遇 智能驾驶系统的核心是“感知-决策-执行”闭环,而工业数字孪生的第一步同样是“数据采集”,但与传统工业自动化不同,数字孪生需要的是“全要素、全流程、全时空”的数据覆盖,这与智能驾驶对环境感知的严苛要求如出一辙。
以2026年某汽车零部件制造商的实践为例:该企业为某新能源车企供应电池托盘,传统生产线上,设备状态、工艺参数、质量检测等数据分散在多个系统中,形成“数据孤岛”,引入数字孪生平台后,企业部署了超过2000个传感器,覆盖冲压、焊接、涂装、装配全流程,甚至在模具表面嵌入压电传感器,实时监测应力变化,这种“无死角”的数据采集方式,与智能驾驶中激光雷达、摄像头、毫米波雷达的多源数据融合异曲同工——都是为了构建一个“完整、实时、准确”的虚拟世界。
更值得关注的是,该企业还借鉴了智能驾驶的“冗余设计”理念,在关键工序(如焊接)中,同时采用红外测温仪和热成像仪两种传感器,当单一传感器数据异常时,系统自动切换至备用数据源,确保孪生模型的准确性,这种“双保险”机制,正是特斯拉Autopilot等智能驾驶系统在感知层的核心设计原则。
建模与仿真:数字孪生的“大脑”如何像智能驾驶一样“思考”
数据采集只是第一步,真正的挑战在于如何将海量数据转化为可执行的决策,在智能驾驶领域,这一过程依赖“高精度地图+实时定位+路径规划”的组合;而在工业数字孪生中,对应的则是“多尺度建模+动态仿真+优化算法”。

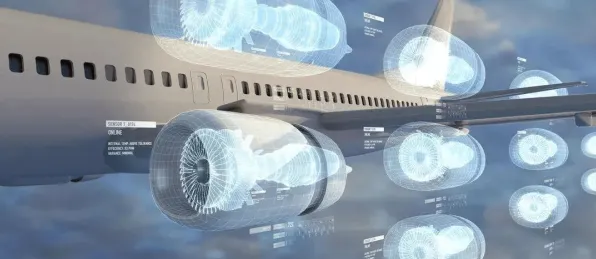
2026年,某航空发动机制造商的案例极具代表性,该企业为某型涡扇发动机建立数字孪生模型时,面临两大难题:一是发动机内部流场、热场、应力场的耦合关系极其复杂;二是试车数据量庞大(单次试车产生TB级数据),传统建模方法效率低下,企业的解决方案是:借鉴智能驾驶中的“分层建模”思路,将发动机分解为叶片、燃烧室、涡轮等子模块,每个模块独立建模后再集成;同时引入智能驾驶常用的“神经辐射场(NeRF)”技术,通过少量试车数据快速生成高精度流场模型,建模周期从3个月缩短至2周。 2026年数字乡村与青少年教育热度持续上升,相关产业迎来新发展
在仿真环节,该企业更直接“移植”了智能驾驶的“数字孪生测试床”概念,传统工业仿真通常在离线环境中进行,而该企业构建了一个与物理试车台实时同步的虚拟试车台,支持“假设-分析”场景的快速验证,当工程师想测试某种新型涂层对叶片寿命的影响时,无需实际加工叶片,只需在虚拟模型中修改材料参数,系统即可自动模拟涂层在高温、高速气流下的剥落过程,并预测寿命变化,这种“虚拟试错”能力,与智能驾驶中通过仿真测试极端场景(如暴雨、雪雾)的逻辑完全一致。
实时决策:从“规则驱动”到“数据驱动”的智能进化
智能驾驶系统的“聪明”程度,取决于其决策算法的先进性——是依赖预设规则的“初级阶段”,还是能通过学习不断进化的“高级阶段”?工业数字孪生平台同样面临这一选择,而2026年的实践表明,越来越多的企业正从“规则驱动”转向“数据驱动”。
以某钢铁企业的热连轧生产线为例:传统控制系统中,轧制力、张力、速度等参数的调整依赖工程师的经验公式,但面对不同钢种、不同规格的订单时,调整效果往往不稳定,2026年,该企业引入数字孪生平台后,采用“强化学习+数字孪生”的混合架构:在虚拟环境中,算法通过与孪生模型的交互,不断尝试不同的参数组合,并根据“成品厚度偏差”“板形平整度”等指标获得“奖励”或“惩罚”,最终学习到最优控制策略,实际生产中,系统每50毫秒(相当于智能驾驶的决策周期)根据实时数据调整一次参数,使产品合格率从92%提升至98%。

这种“在虚拟世界中学习,在物理世界中执行”的模式,与特斯拉FSD(完全自动驾驶)的“影子模式”高度相似——特斯拉通过收集全球数百万辆车的驾驶数据,在云端训练自动驾驶模型,再将优化后的算法推送到车辆端,工业场景中,虽然数据规模和复杂度不同,但“数据-模型-决策”的闭环逻辑完全一致。
动态优化:数字孪生如何像智能驾驶一样“自适应”
智能驾驶系统最核心的能力之一是“自适应”——无论是面对突然闯入的行人,还是变化的交通信号,系统都能实时调整驾驶策略,工业数字孪生的高级阶段同样需要这种“动态优化”能力,尤其是在柔性制造场景中。
2026年,某电子制造企业的SMT(表面贴装技术)生产线提供了典型案例,该企业为多家客户生产不同型号的电路板,传统生产线换型时需要停机调整设备参数,耗时长达2小时,引入数字孪生平台后,企业构建了“设备-物料-工艺”的全要素孪生模型,并开发了一套“自适应换型”算法:当新订单到达时,系统根据电路板尺寸、元件布局、贴装顺序等特征,自动生成最优设备参数组合,并通过数字孪生模型验证参数的可行性;实际换型时,设备按预设参数自动调整,换型时间缩短至15分钟。
更关键的是,该系统还具备“在线学习”能力,在生产过程中,系统持续收集实际贴装精度、设备振动等数据,并与孪生模型的预测值对比,当偏差超过阈值时,自动触发参数优化流程,这种“边生产边优化”的模式,与智能驾驶中根据路况实时调整巡航速度、跟车距离的逻辑完全一致——都是通过“反馈-修正”机制实现系统的持续进化。 本月关注智能家居与智慧城市及心理咨询发展动态,技术创新推动产业升级

安全与可靠性:工业数字孪生的“防御性驾驶”
智能驾驶系统必须具备“防御性驾驶”能力——即提前预判风险并采取措施避免事故,工业数字孪生平台同样需要这种“安全第一”的设计理念,尤其是在能源、化工等高危行业。
2026年,某化工企业的数字孪生安全监控系统提供了生动案例,该企业为某大型炼油厂构建了包含管道、阀门、反应釜等全要素的数字孪生模型,并集成温度、压力、流量等传感器数据,系统采用“双层预警”机制:第一层基于规则引擎,当监测数据超过阈值时立即报警;第二层基于机器学习,通过分析历史故障数据,预测设备潜在故障风险,当系统检测到某反应釜的振动频率与历史故障数据中的“催化剂结块”特征匹配时,即使温度、压力等参数正常,也会提前发出预警,提醒操作人员检查。
这种“预防性维护”逻辑,与智能驾驶中的“前向碰撞预警(FCW)”功能异曲同工——FCW通过摄像头或雷达检测前方车辆距离,当系统判断存在碰撞风险时,提前警告驾驶员或自动制动;工业场景中,数字孪生系统通过数据异常检测,提前发现设备故障隐患,避免事故发生。 聚焦循环经济与植物保护发展新趋势,应用场景不断拓展
边缘计算与5G:让数字孪生“跑”得像智能驾驶一样快
智能驾驶系统对实时性的要求极高——从感知到决策再到执行,整个闭环必须在100毫秒内完成,否则可能导致事故,工业数字孪生同样需要“低延迟、高可靠”的计算架构,尤其是在高速运动设备(如机器人、数控机床)的监控场景中。
2026年,某半导体企业的晶圆制造案例极具说服力,该企业的光刻机每秒移动距离超过1米,对位置控制的精度要求达到纳米级,传统集中式监控系统因数据传输延迟(通常超过50毫秒),无法满足实时控制需求,企业引入数字孪生平台后,采用“边缘计算+5G”架构: