在2026年的工业领域,智能机器人与数字孪生技术的深度融合正掀起一场前所未有的变革,当人们谈论智能机器人如何在复杂工业场景中实现高效协同、精准决策时,一个看似高深却极具现实意义的经济学概念——纳什均衡,悄然成为理解这一变革的关键钥匙,它不仅揭示了智能机器人群体在数字孪生环境中的行为逻辑,更通过一个个鲜活的实施案例,展现了工业数字化转型的无限可能。
纳什均衡:从博弈论到智能机器人的“行为密码”
纳什均衡,由数学家约翰·纳什提出,是博弈论中描述多方参与者在非合作状态下达到稳定策略组合的核心概念,当每个参与者都认为自己的策略是最优的,且在其他参与者策略不变的情况下,任何一方单方面改变策略都不会获得更大收益时,系统就达到了纳什均衡,这一理论最初用于解释人类社会的经济行为,但在2026年的工业场景中,它却被赋予了新的生命——成为理解智能机器人群体协同行为的“密码”。 聚焦AIGC内容与文化传承及储能材料发展新趋势,应用场景不断拓展
2026年噪音治理与产业升级及绿色运营链领域取得重要进展,行业关注度持续提升 在智能机器人主导的工业生产线上,每个机器人都是一个独立的“参与者”,它们通过传感器、算法和通信网络感知环境、做出决策,当这些机器人被部署在数字孪生环境中时,它们的每一个动作都会被实时映射到虚拟空间,形成与物理世界完全同步的“数字镜像”,这种映射不仅让机器人能够“预见”自己的行为后果,还能通过分析其他机器人的数字镜像,预测它们的行动策略,纳什均衡便成为机器人群体达到最优协同状态的“隐形规则”——每个机器人都选择对自己最有利且不破坏整体效率的策略,最终实现整个生产系统的稳定运行。
汽车制造中的“机器人协奏曲”
2026年,全球知名汽车制造商特斯拉在其上海超级工厂引入了一套基于纳什均衡的智能机器人协同系统,用于车身焊接工序,这一工序涉及数十台工业机器人,它们需要在狭小的空间内完成高精度的焊接任务,同时避免碰撞、确保焊接质量,传统方案中,机器人通过预设路径和固定时序运行,但一旦遇到设备故障或环境变化,整个生产线就会陷入混乱。
特斯拉的解决方案是构建一个数字孪生平台,将所有机器人的实时数据(位置、速度、焊接参数等)映射到虚拟空间,在此基础上,每台机器人都运行一套基于纳什均衡的决策算法:它会根据自身任务优先级、当前位置、其他机器人的状态,以及数字孪生模型预测的未来30秒内的系统状态,动态调整自己的行动策略,当一台机器人检测到前方路径被占用时,它不会盲目等待,而是通过数字孪生模型分析其他机器人的可能路径,选择一条最优的避让路线,同时确保自己的焊接任务不受影响。
这一系统的效果令人惊叹,据特斯拉官方数据,引入纳什均衡协同系统后,车身焊接工序的效率提升了22%,设备故障率下降了35%,且从未发生过机器人碰撞事故,更关键的是,当某台机器人因维护需要临时离线时,其他机器人能迅速通过数字孪生模型重新计算纳什均衡点,自动调整策略,确保生产线不停顿,这种“自组织、自适应”的能力,正是纳什均衡在智能机器人群体中的生动体现。

半导体工厂的“零故障奇迹”
在半导体制造领域,对生产环境的洁净度和设备稳定性要求极高,2026年,台积电在其位于台湾新竹的12英寸晶圆厂中,部署了一套基于纳什均衡的智能机器人维护系统,用于监控和维修价值数亿美元的光刻机等关键设备,这一系统的挑战在于:光刻机的维护需要多台机器人协同完成,包括机械臂搬运零件、检测设备诊断故障、清洁机器人清理微尘等,且任何一台机器人的失误都可能导致整条生产线停机,造成每小时数百万美元的损失。
台积电的解决方案是构建一个覆盖全厂的数字孪生平台,将所有设备的运行数据、机器人的动作轨迹、环境参数(温度、湿度、洁净度)等实时映射到虚拟空间,在此基础上,每台维护机器人都运行一套基于纳什均衡的“任务分配-执行”算法:它会根据设备的紧急程度、自身技能(如机械臂的精度、检测设备的灵敏度)、其他机器人的当前任务,以及数字孪生模型预测的设备故障概率,动态选择最优的维护任务,当两台光刻机同时报修时,系统会通过纳什均衡计算,让擅长精密操作的机器人优先处理故障概率更高的设备,而让其他机器人继续完成正在进行的清洁或检测任务,避免资源浪费。
这一系统的实施效果堪称“奇迹”,据台积电官方报告,引入纳什均衡维护系统后,光刻机的平均无故障时间(MTBF)从原来的500小时延长至720小时,维护响应时间从15分钟缩短至3分钟,且全年未发生因机器人协同失误导致的生产线停机事故,更令人印象深刻的是,当某台机器人因电池耗尽需要更换时,其他机器人能通过数字孪生模型迅速重新分配任务,确保维护工作无缝衔接,真正实现了“零故障、零停机”的目标。
物流中心的“机器人交响乐”
在电商物流领域,如何让数百台智能机器人高效协同完成订单分拣、包装和运输,是行业长期面临的难题,2026年,京东物流在其位于上海的亚洲一号智能仓库中,引入了一套基于纳什均衡的机器人调度系统,用于管理超过500台AGV(自动导引车)、机械臂和无人机的协同作业,这一仓库每天需要处理数百万件商品的分拣任务,且要求在2小时内完成从订单接收、商品分拣到包装出库的全流程,对机器人的协同效率提出了极高要求。

京东的解决方案是构建一个覆盖全仓库的数字孪生平台,将所有机器人的实时位置、任务状态、商品库存信息,以及仓库的布局(货架位置、通道宽度)等映射到虚拟空间,在此基础上,每台机器人都运行一套基于纳什均衡的“路径规划-任务分配”算法:它会根据自身当前位置、目标任务位置、其他机器人的路径规划,以及数字孪生模型预测的未来5分钟内的仓库拥堵情况,动态选择最优的行驶路径和任务执行顺序,当多台AGV需要同时经过同一通道时,系统会通过纳什均衡计算,让载重较轻、速度较快的AGV优先通过,而让载重较重、速度较慢的AGV稍作等待,避免通道堵塞。
这一系统的实施效果显著,据京东官方数据,引入纳什均衡调度系统后,亚洲一号仓库的订单处理效率提升了30%,机器人碰撞事故率下降了90%,且在“双11”等高峰期,仓库仍能保持每小时处理超过10万件商品的稳定吞吐量,更关键的是,当某台机器人因故障需要维修时,其他机器人能通过数字孪生模型迅速重新规划路径和任务,确保仓库运营不受影响,真正实现了“越忙越稳、越快越准”的目标。
纳什均衡与数字孪生:工业智能的“双轮驱动”
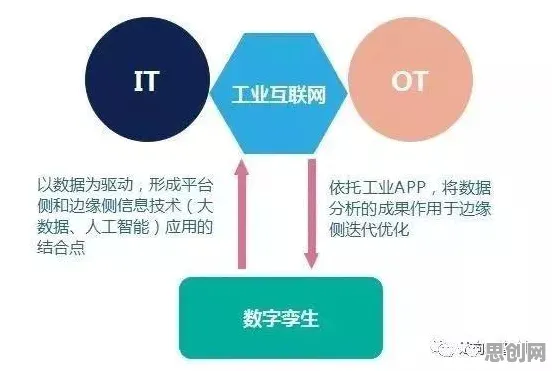
本月土壤修复热度不断攀升,技术创新带来新突破 从特斯拉的车身焊接、台积电的半导体维护,到京东的物流调度,这些2026年的真实案例共同揭示了一个趋势:纳什均衡正在成为智能机器人群体协同的“隐形规则”,而数字孪生技术则是这一规则得以实现的“关键载体”,通过数字孪生,智能机器人能够“看见”自己的行为后果,预测其他机器人的行动策略,从而在非合作状态下达到纳什均衡,实现整体效率的最优。
资源回收与绿色转化热度持续攀升,相关应用不断深化 这种“双轮驱动”的模式,不仅解决了工业场景中机器人协同的复杂性问题,更推动了工业生产从“自动化”向“智能化”的跨越,在未来的工业图中,我们可以预见:更多的企业将借助纳什均衡与数字孪生的融合,打造出能够自我优化、自我适应的智能生产系统;智能机器人将不再是孤立的“工具”,而是成为能够理解系统目标、与其他机器人“协商”策略的“智能伙伴”;而工业生产,也将因此变得更加高效、灵活和可持续。
2026年的工业变革,正以我们难以想象的速度推进,而纳什均衡与数字孪生的结合,无疑为这一变革提供了最强大的“引擎”,当智能机器人在数字孪生的世界中学会“博弈”、达成“均衡”,我们看到的,不仅是技术的进步,更是工业文明向更高阶段迈进的坚实步伐。